微软AR/VR专利提出采用动态可寻址快门阵列(DASA)与多透镜阵列的组合
采用动态可寻址快门阵列(DASA)与多透镜阵列的组合
(映维网Nweon 2022年07月07日)大多数人都会认同,当前的头显形态远非理想。所以,行业的各家厂商都在积极探索优化头显的方法。现有配置倾向于使用单个透镜聚焦图像以供用户眼睛查看。然而,单个透镜往往体积大、重量重,这就排除了所需的轻质紧凑形状参数。
行业有尝试通过多透镜阵列(MLA)代替大型单透镜。遗憾的是,有多个因素影响了采用MLA的头显图像质量。例如,用于MLA的一个透镜的光可以渗入相邻透镜,而这种串扰会降低图像质量。
针对这个问题,微软在名为“Head mounted display device”的专利申请中提出了自己的解决方案。
头戴式显示器设备可以向用户呈现虚拟内容。内容或图像通常在称为“视窗”的图像区域中再现。但对于传统的头显设备,宽视野图像的再现可能十分困难,因为用于显示宽视场图像的现有技术通常试图优化整个视窗的图像。这种全视窗图像优化一般需要采用复杂、昂贵和笨重的光学组件。替代的传统设计采用单个光学元件,例如单个透镜。
然而,单透镜会导致效率低下,因为大部分光线无法到达视窗和/或未正确准直,无法为用户提供清晰的图像。另外,透镜的焦距通常限制为大于其直径,所以单透镜系统将产生大于头显所需的总轨迹长度(TTL)。
所以,行业把目光投向了多镜头阵列(MLA),但测试结果低于市场预期。MLA的一个困难是,用于MLA的一个透镜的光可以渗入相邻透镜,而这种串扰会降低图像质量。
针对这个问题,微软提出了自己的解决方案。
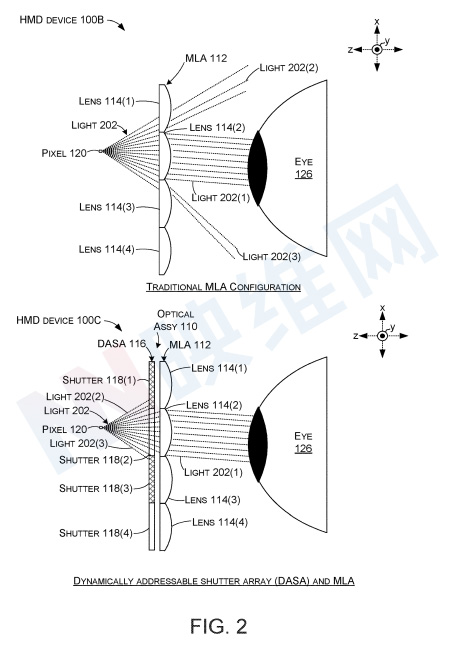
图2表示了采用传统MLA配置的头显100B与采用动态可寻址快门阵列(DASA) 116与MLA 112组合的微软示例头显100C。
在头显 100B的传统MLA配置中,当光202从像素120发射时,部分光202(1)穿过目标透镜114(2)以形成眼睛126所感知的图像。其他光202(2)和202(3)分别通过相邻的透镜114(1)和114(3),并产生所谓的串扰。光202(2)和202(3)可以降低图像质量,例如降低图像对比度,并且可以视为相对于图像的噪点。
头显 100C可以包括具有独立可控快门118的DASA 116。在这个示例中,快门118(2)可以打开以允许光通过,而相邻的快门118(1)和118(3)关闭。因此,光202可以对准特定透镜114(2)。遮板118(1)和118(3)可以阻挡光202(2)和202(3),以防止光202(2)和202(3)到达透镜114(1)和114(3)。
打开快门118(2)允许光202(1)到达目标透镜114(2),以有助于用户眼睛126的图像生成。光202(2)和202(3)被阻挡,并且可以减少和/或消除与所述光相关的任何图像退化。因此,与传统的MLA-头显设备相比,微软表示这一方法可以提供显著改进的图像质量和分辨率。
图3A-3D共同示出了另一个示例头显设备100D。在所述示例中,DASA 116包括一个4*4快门阵列118。在所述示例中,像素120、快门118和透镜114之间存在一对一的比率(其他实现可以有其他比率)。
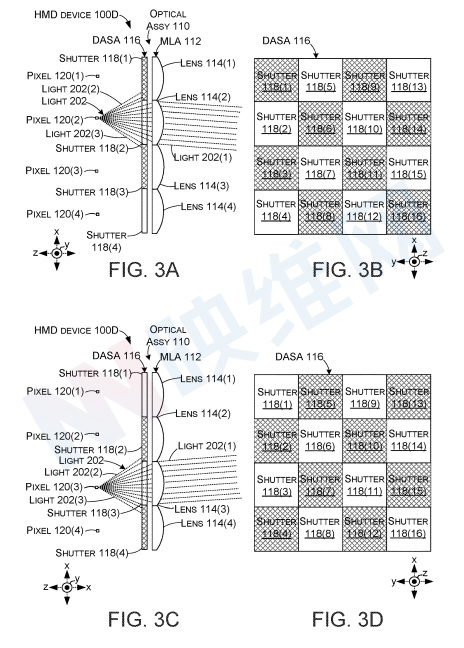
图3A-3D同时说明了如何控制快门118以共同形成高质量图像。出于解释的目的,头显设备100D可以以给定的频率或刷新率向用户呈现图像。如图所示。3A和3B对于给定周期的第一部分,可以接通像素120(2)的电源,并且可以打开快门118(2),同时关闭相邻的快门118(1)、118(3)和118(6)。因此,对于周期的第一部分,来自像素120(2)的光202有效地仅通过透镜114(2)到达视窗。
如图所示。3C和3D对于给定周期的第二部分,可以接通像素120(3)的电源,并且可以打开快门118(3),同时关闭相邻的快门118(2)、118(4)和118(7)。
因此,对于周期的第二部分,来自像素120的光202仅有效地通过透镜114(3)到达视窗。微软指出,与以前的技术相比,可以用更少的处理和显示资源生成所述图像。与在整个周期内激活单个像素的情况相比,用户将倾向于认为图像具有更高的质量和对比度。
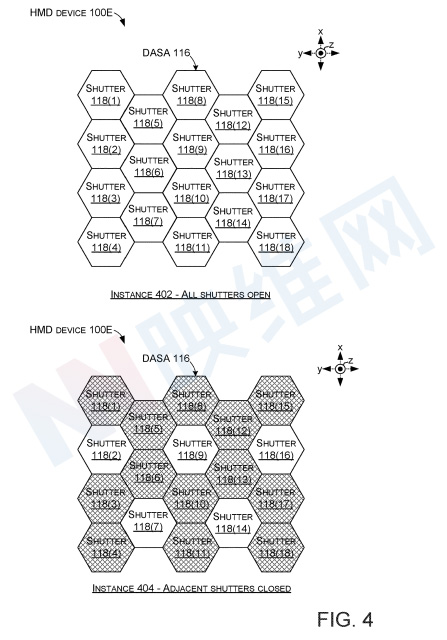
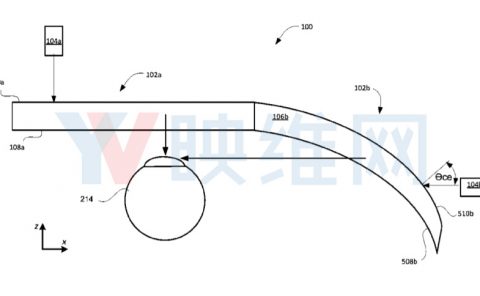
图4示出了采用DASA 116的另一示例头显设备100E。在这种情况下,DASA 116的快门118布置在六角形阵列(例如蜂窝)中。六边形阵列可以有效防止与串扰相关的图像退化。
实例402显示所有快门118打开,以便光可以通过。实例404显示快门118(2)、118(9)、118(16)、118(7)和118(14)打开。与打开的快门相邻的所有快门118都可以关闭。因此,快门118(1)、118(3)、118(4)、118(5)、118(6)、118(8)、118(10)、118(11)、118(12)、118(13)、118(15)、118(17)和118(18)关闭。所述配置提供了有效阻断串扰的技术解决方案,从而提高了图像质量。
图5A-5C共同示出了另一示例头显设备100F。所述示例包括多个MLA 112。在这个示例中,只示出两个MLA 112(1)和112(2)。第一MLA 112(1)的像素120、快门118和透镜114之间存在一对二对二的比率。
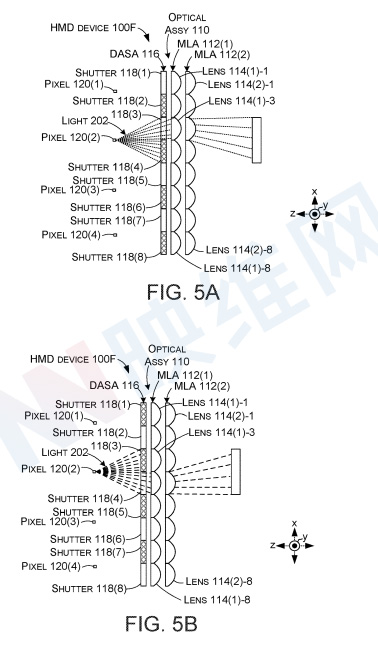
图5A和5B同时说明了如何控制快门118以允许单个像素对感知图像贡献多次。所述过程可以大致类似于隔行扫描等过程,并且可以产生大于像素数的图像分辨率。头显设备100F可以以给定的频率或刷新率向用户呈现图像。
如图5A所示,对于给定周期的第一部分,可以接通像素120(2)的电源,并且可以打开快门118(3),同时关闭相邻的快门118(2)和118(4)。因此,对于周期的第一部分,来自像素120(2)的光202有效地仅通过透镜114(1)-3到达视窗。
如图5B所示,对于给定周期的第二部分,像素120(2)可以继续通电,并且可以打开快门118(3),同时关闭相邻的快门118(2)和118(4)。因此,对于周期的第二部分,来自像素120(2)的光202有效地仅通过透镜114(2)-4到达视窗。
如图5C所示,比在沿着单个光路的整个周期中激活单个像素的情况下,用户将倾向于感知图像具有更高的分辨率和/或对比度。假设循环周期为1/60秒。快门118(3)可以从周期时间的第一部分(1/120)打开,并向没有串扰的图像提供光,快门118(4)可以在周期时间的第二部分(1/120)打开,并向没有串扰的图像提供光。用户的大脑倾向于融合这两幅图像,并感知到比其他情况更高的分辨率、更高的对比度图像。
因此,微软表示DASA解决了与MLA中的小相邻透镜可能发生的广泛串扰和图像退化相关的技术问题。
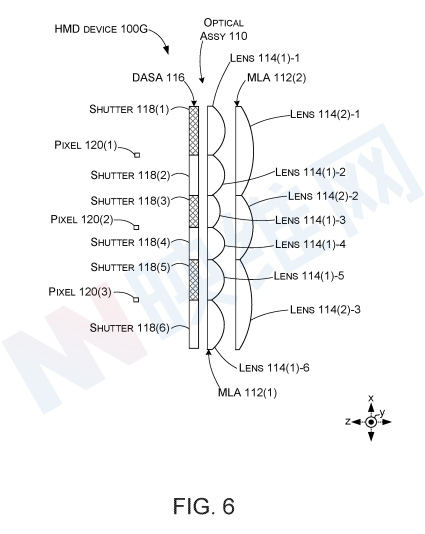
图6示出了另一示例头显设备100G。在这种情况下,挡板118的直径不均匀。在所述示例中,遮板118的直径朝向DASA 116的中心较小,朝向DASA的边缘较大。例如,快门118(3)和118(4)位于中心位置,直径小于快门118(2)和118(5)。反过来,快门118(2)和118(5)的直径小于位于DASA 116外围的快门118(1)和118(6)。
因此,从一个角度来看,可以将快门视为快门的同心圆(例如,牛眼),其直径随着与DASA中心的距离增加而逐渐增大。这是一种创建分辨率变化的方法,以便在图像中心有更高的分辨率。这存在帮助,因为图像的中心趋向于对应于用户的中心凹视觉,并且对应于外围视觉的较低分辨率趋向于不被用户注意到。
在所述示例中,遮板118的尺寸和位置对应于MLA 112(1)的相邻透镜114(1)的尺寸和位置。透镜114(1)的直径朝着MLA 112(1)的外围增大。透镜114(1)与MLA 112(2)的透镜114(2)协同操作,以生成用户的图像。DASA 116的快门118可以动态且独立地打开和关闭,以促进图像形成并减少和/或消除串扰。
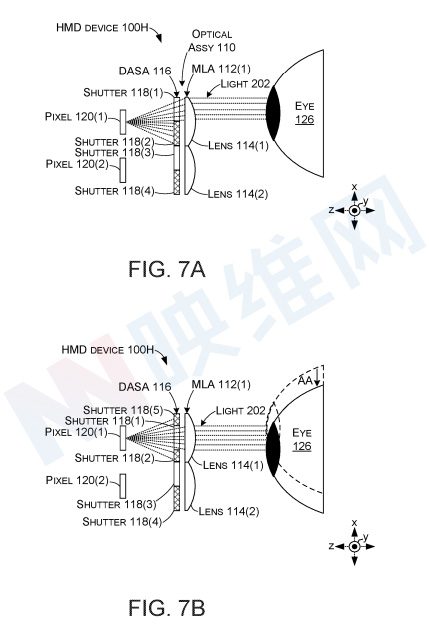
图7A和7B共同示出了另一示例头显设备100H。在这种情况下,可以基于与头显设备100G相关联的一个或多个参数来确定快门118的位置。参数可以包括与用户相关联的参数,例如眼睛位置和/或注视方向。图7A示出了眼睛126位于第一位置并且像素120(1)产生光202的初始配置。光通过打开的快门118(1),但被关闭的快门118(2)阻挡。
图7B显示了响应于箭头AA所示眼球运动的第二配置。除了眼睛的运动作为注视角度的函数外,如果用户的头部相对于头显设备移动,则可能会发生眼睛运动。或者,如果具有不同瞳孔间距(IPD)的不同用户戴上头显设备,并且为该用户生成相同的内容,则可能发生移动。
在这种情况下,打开的快门118(1)已与眼球运动平行向下移动,并且快门118(5)已替换先前由快门118(1)占据的上部。从另一个角度来看,快门实际上没有移动,而是DASA 116的打开和关闭部分已经移动。
移动打开的快门的位置可以保持图7B中生成的图像与图7A中生成的图像一致(并且可能相同)。在这种情况下,单个快门本身可能需要一组动态可寻址元素。可以控制多组元素,以便为给定场景提供所需的快门功能。
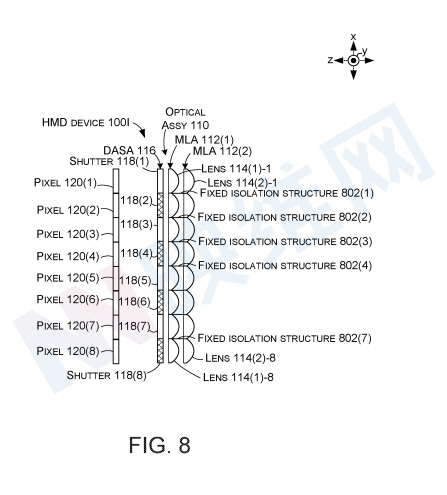
图8示出了另一示例头显设备100I。在这种情况下,DASA 116插入像素120和第一MLA 112(1)之间。固定隔离结构802位于MLA 112(1)和112(2)的透镜之间。固定隔离结构可以将透镜对与相邻的MLA光学隔离。这可以允许固定隔离结构802防止与离开MLA 112(1)的透镜114(1),并到达MLA 112(2)的多个透镜114(2)的光相关联的串扰。
相反,固定隔离结构在透镜对之间保持一对一的关系。例如,来自透镜114(1)-1的光可以到达透镜114(2)-1,但被来自相邻透镜114(2)-2的固定隔离结构802(1)阻挡。
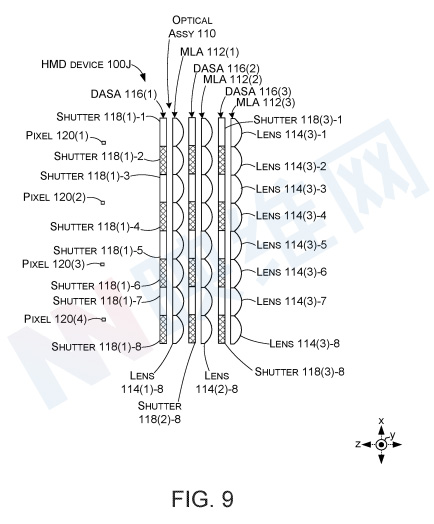
图9示出了另一示例头显设备100J。在这种情况下,DASA 116(1)被插入像素120和第一MLA 112(1)之间。另一DASA 116(2)插在第一MLA 112(1)和第二MLA 112(2)之间。
另一DASA 116(3)插在第二MLA 112(2)和第三MLA 112(3)之间。每个DASA可以独立控制,以实现所需的光路,同时阻挡其他光路。在所述实现中,三个MLA 112的透镜114彼此相同。图10示出了备选配置,其中各个MLA的透镜彼此不同。尽管图9示出了三个MLA 112和三个DASA 116,但其他实现可以包括更少或更多。
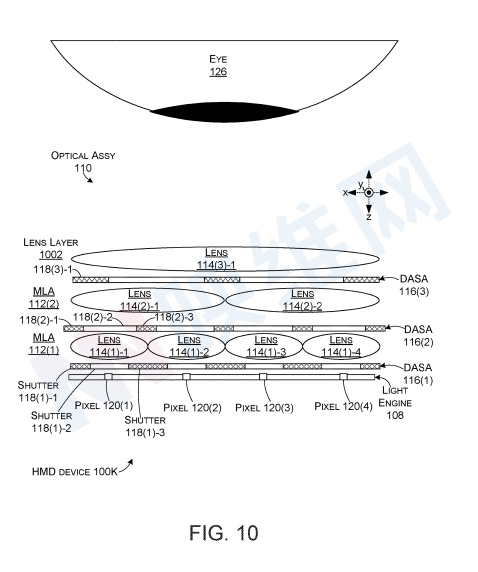
图10示出了另一示例头显设备100K。所述示例头显设备包括三个透镜层。前两个透镜层是MLAs 112(1)和112(2)。在这种情况下,第三透镜层表现为单个透镜114(3)-1,并且因此被指定为透镜层1002,而不是MLA 112。然而,第三层(和/或附加层)同样可以显示为MLA。
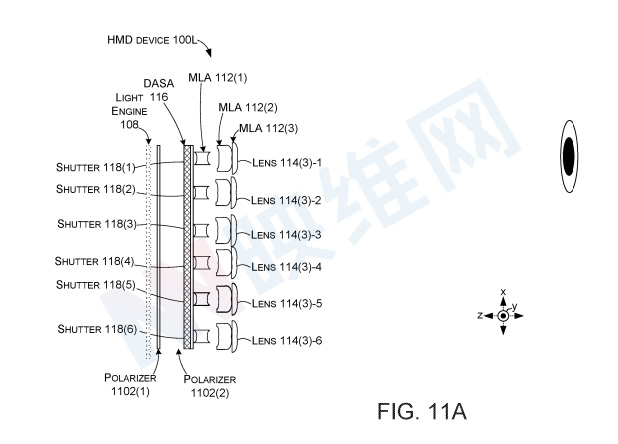
图11A-11C共同示出了另一示例头显设备100L。在这种情况下,光引擎108可以表现为有机发光二极管(OLED)面板或无机发光二极管(ILED)等。第一偏振器1102(1)可以位于光引擎108和DASA 116之间。第二偏振器1102(2)可位于DASA 116和MLA 112(1)之间。
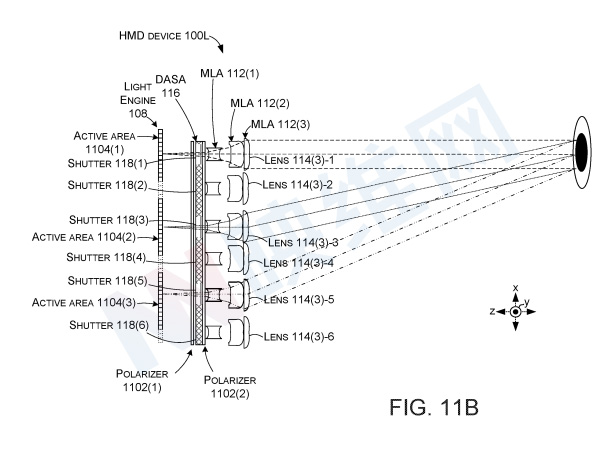
在这种情况下,遮板118可以是方形。在这个配置中,可以打开多组快门以协同工作,同时关闭其他快门以防止串扰。例如,快门118(1)、118(3)和118(5)可以一起操作,快门118(2)、118(4)和118(6)可以一起操作。
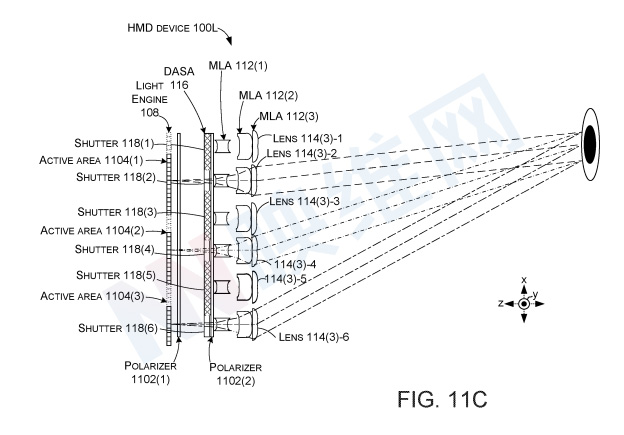
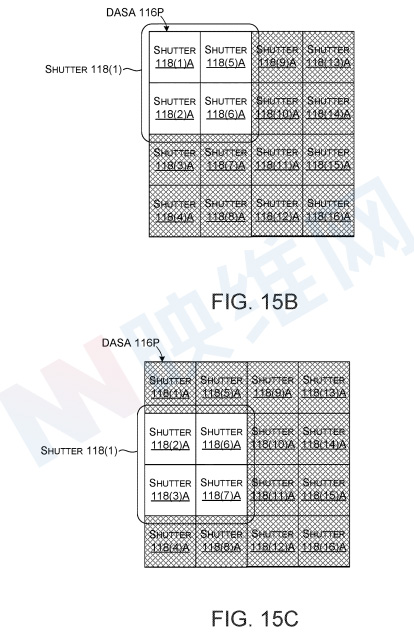
图14-15C分别共同显示了示例DASAs 1160和116P。如上所述,DASA可以包含可独立寻址区域的阵列或矩阵,其可控制以在透射状态或不透明状态之间切换。DASA可以表现为被动可寻址数组或主动可寻址数组。被动寻址阵列可以表现出双稳定性。
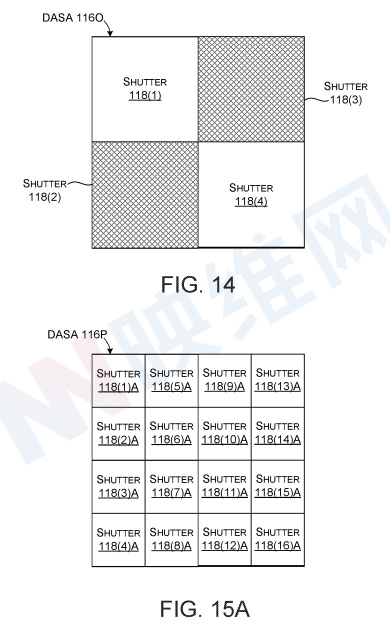
例如,DASA的状态可以通过为单个水平行快门供电来设置。行通电时,可以打开或不打开各个列的电源,以设置各个快门的状态。然后,该过程向下移动到下一行,快门将保持其状态,直到再次寻址。主动可寻址阵列则依靠专用电子器件(如晶体管和电容器)将阵列的单个快门保持在给定状态,直到再次寻址为止。
DASA可以具有类似于靠近DASA的像素120和/或MLA 112的透镜114的区域的区域。例如,图8示出了MLA 112(1)的像素120、快门118和透镜114具有类似区域的版本。图14示出了与图8中所示的DASA 116类似的DASA 116O。
头显设备性能可以使用软件建模,或可以在测试场景中测量,例如在实验室或制造设施中。通过在距光学组件的特定距离和方向上放置一个模拟眼睛的摄像头,可以获得测量的性能。然后可以在特定参数值下驱动每个像素120。
光学模型将预测产生光线的位置和强度。任何与预测值的偏差(例如校正数据)都可以以各种方式存储在存储器中。在一种情况下,预测值和测量值之间的偏差可以存储为测量性能的一部分。DASA 116的快门118的位置、尺寸和/或状态可以根据光线确定,以校正与模型的变化。
可以针对每个像素120以各种参数值(例如,强度)单独重复测试过程。可以对每个像素单独重复所述过程,然后再相互组合。然后,测试可以使用各种快门配置和状态来识别产生更高质量图像的组合。测试过程可直接在头显设备100L上执行。或者,可以在具有共同设计规范(例如,设备模型)的一个或多个设备执行测试过程,然后将其存储在该模型的其他头显设备。
在一个实现中,控制器128在确定如何显示图像时可以采用反馈机制。例如,可以利用神经网络来确定特定图像像差的存在,并且通过机器学习,可以确定适当的参数值来驱动各个像素和/或快门,以便校正像差。类似地,神经网络可以利用眼动追踪信息来推断应激活或禁用哪些单个像素和快门,以确保在用户的眼睛处接收高质量光线。
名为“Head mounted display device”的微软专利申请最初在2020年12月提交,并在日前由美国专利商标局公布。