微软专利分享:包括多个独立可控层堆栈的多用途AR/VR控制器
控制器
(映维网Nweon 2022年08月04日)在现实生活中,我们人类倾向于用手与物体互动,包括接触、触摸、抓取、操纵和释放这。大多数虚拟环境允许用户触摸和抓取不同形状的对象。然而,无论用户拿起一把剑、一个大水罐或一个球,用户都在物理持有固定形状和固定大小的控制器。
针对这个问题,微软在名为“Multilayer controller”的专利申请中提出了一种特殊的控制器装置。具体来说,这种控制器可以包括多个独立可控层的堆栈,而所述层可以模拟不同大小和/或形状的对象。层的大小可以与抓取手的单个手指对齐,并通过增大或减小每个层的大小来模拟各种虚拟对象的轮廓。
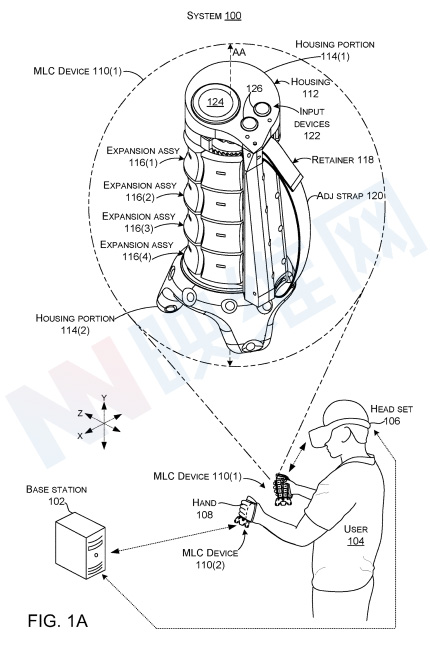
如图所示,专利描述的控制器设备110可以包括壳体112。上部和下部壳体部分114(1)和114(2)可见。壳体112通常可以沿着轴AA或在轴AA之间伸长和延伸。可独立控制的膨胀组件116可相对于壳体112定位。在这种情况下,膨胀组件可以插入壳体部分114之间,例如通过沿轴AA定位或以替代方向定位。
在所述示例中,设备共有四个膨胀组件116。用户可以握住控制器设备110,使手指与各个膨胀组件116对齐。例如,用户的食指可以与膨胀组件116(1)对齐,用户的中指可以与膨胀组件116(2)对齐,用户的无名指可以与膨胀组件116(3)对齐,用户的小指可以与膨胀组件116(4)对齐。根据用户偏好,拇指可以环绕控制器设备并部分重叠其中一个手指,例如食指。
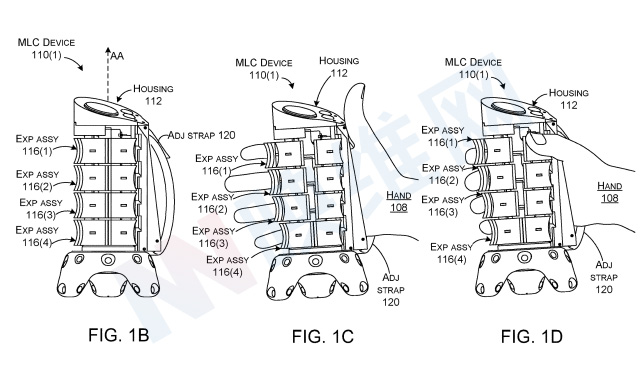
在这种情况下,即使当用户没有抓住控制器设备时,可调束带120形式的护圈118都可以将其固定在用户的手上。控制器设备110可由用户通过拧紧其手周围的可调节带120来实现佩戴。壳体112可以按照人体工程学进行弯曲,以与用户的指关节大致对齐。通过以这种方式将设备固定在手上,用户可以自由地抓取和释放渲染的形状。
单个膨胀组件116的周长可调,可在一系列尺寸范围内膨胀和收缩。单个膨胀组件的周长可以共同近似于虚拟对象的大小和/或形状(例如周长)。
在一个实施例中,输入设备122位于壳体112之上。例如,在外壳部分114(1)使用轨迹板124和两个输入按钮126,并且六自由度传感器定位在外壳部分114(2)中(但被遮挡)。

图2A和2B共同示出了控制器设备110(1),并示出了关于膨胀组件116的细节。单个膨胀组件可以包括多个凸耳或楔块202。所述实现为每个膨胀组件116使用五个凸耳202。单个凸耳202可以朝向和远离膨胀组件的中心移动,以影响膨胀组件的周长204。
在一个实施例中,单个膨胀组件116的凸耳202同步,例如同时以相同的量移入或移出。在其他实现中,可以单独控制各个凸耳,以生成更多不同的形状,包括规则形状和/或不规则形状。
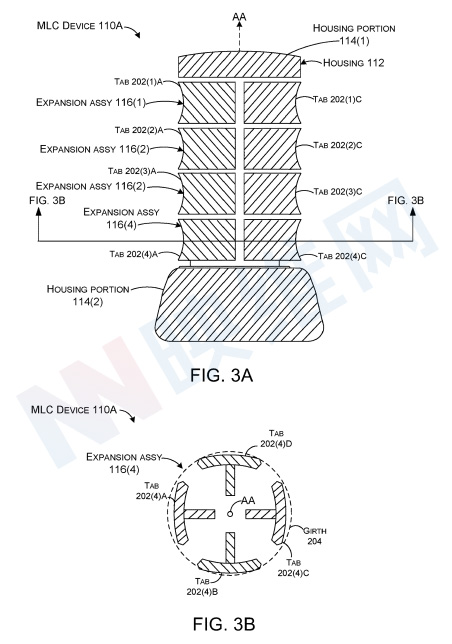
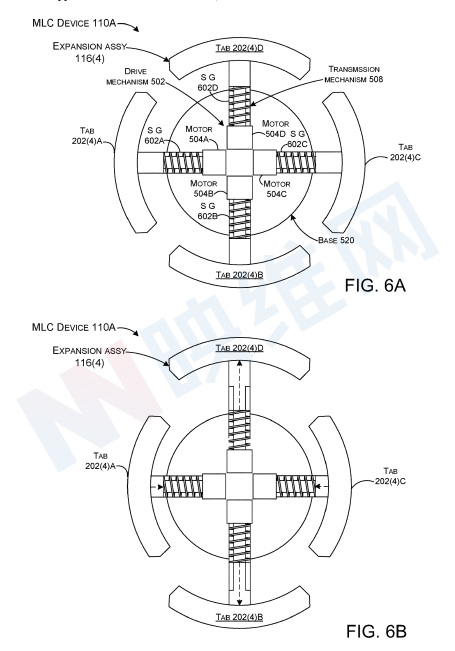
图3A和3B共同示出了另一控制器设备110A。并显示有关膨胀组件116的详细信息。所述实现为每个膨胀组件116使用四个凸耳202。单个凸耳202可以朝向和远离膨胀组件的中心移动,以影响膨胀组件的周长204。在这种情况下,中心可以与AA线同时发生。因此,线AA可以定义凸耳202的焦点。
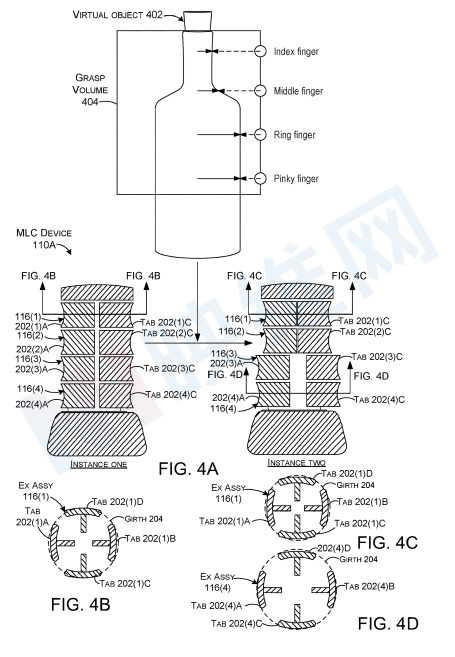
图4A-4D共同展示了涉及控制器设备110A的用例场景。实例一显示了控制器设备处于中性位置,每个膨胀组件116设置在中间周长,如图4B所示。此时,在控制器设备110A处接收与虚拟对象402相关的信息。在这种情况下,虚拟对象402是瓶子。
具体地,在控制器设备处接收与虚拟对象402的抓取卷404相关的信息。抓取卷404可以与当用户到达虚拟对象402时预测用户的手与虚拟对象接合的位置相关。抓取卷404可以包括所述位置处的各种尺寸,并由虚拟对象402的半径反映,其中用户的食指、中指、无名指和小指将接合在抓取卷404中。
实例二显示了进行调整以反映单个膨胀组件116的凸耳202的位置。在这个示例中,膨胀组件116(1)和116(2)的凸耳202(1)和202(2)向内拉动,以减小周长204,如图4C所示。相反,膨胀组件116(3)和116(4)的凸耳202(3)和202(4)被向外推,以增加周长204,如图4D所示。
因此,食指和中指接合的膨胀组件116(1)和116(2)的周长相对较小,并模拟瓶子的颈部。相反,由无名指和小指接合的膨胀组件116(3)和116(4)的周长相对较大,并模拟瓶体。
因此,控制器设备110可以用作形状改变控制器,其可以渲染径向对称表面和/或非对称表面,从而实现VR中的全手抓取。
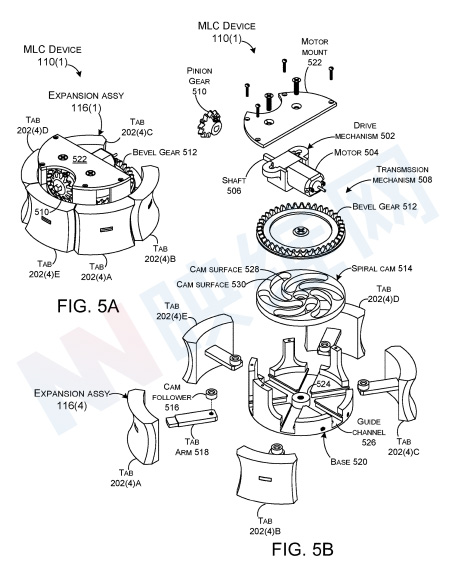
图5A和5B共同展示了示例膨胀组件116(1)的细节。在所述实现中,膨胀组件116(1)可以包括或耦合到驱动机制(例如致动器)502。在这种情况下,驱动机制502表现为转动轴506的电动机504。在其他实现中,驱动机制502可以表现为液压执行器。
在图示配置中,轴506可以作为传动机制508的一部分。传动机制508可以将驱动机制502耦合到凸耳202。在这种情况下,传动机制508可以包括小齿轮510、伞齿轮512、螺旋或径向凸轮514、凸轮从动件516和凸耳臂518。
膨胀组件116(1)同时可以包括底座520和电机安装件522。底座520可以包括轮毂524和导槽526。在这种情况下,轮毂524可以用作围绕其布置凸耳202的焦点。从另一个角度来看,凸耳202可以围绕轮毂524径向布置。
电机504可以固定在电机支架522上,例如使用紧固件。反过来,电机安装件522可以固定在底座520上。小齿轮510可以定位在电机轴506上。小齿轮510可以与伞齿轮512啮合。伞齿轮512和螺旋凸轮514可以固定在一起并定位在轮毂524上。
螺旋凸轮514可以为每个凸耳202(4)定义一对相对的凸轮表面528和530。凸轮从动件516可以位于凸轮表面528和530之间。凸轮表面同时可以固定在凸耳臂518上。凸耳臂518可以位于导槽526中。
当电机504逆时针转动螺旋凸轮514时,凸轮表面528迫使(例如推动)凸轮从动件516远离轮毂524。在这种情况下,凸轮从动件516表现为滚珠轴承,位于凸轮表面528和530之间,并保持在凸耳臂518之中。
因此,凸轮从动件的向外移动导致凸舌臂518和凸舌202(4)从轮毂524向外移动。这增加了轮毂524和凸耳202(4)之间的距离,从而增加了膨胀组件116(4)的周长。当电机504顺时针转动螺旋凸轮514时,凸轮表面530将凸轮从动件516推向轮毂524。这减小了膨胀组件116(4)的周长。
在一个实施例中,可以在每个凸耳202使用缩进,以确保夹持力集中施加到每个凸耳臂518。另外,每个凸耳202的外边缘可以沿圆周凹陷,以便于手指定位,并防止形状变化期间手指受到挤压。
在一个实施例中,与单个凸耳202相关的凸轮表面528和530可以具有基本相同的轮廓。这样的配置可以导致相同的膨胀和收缩率的周长。其他配置可以具有与单个凸耳相关的不同凸轮表面轮廓。例如,凸轮表面528可以具有选择的轮廓,以最初使凸舌向外移动的速度更快,然后随着凸舌接近其最外侧的位置,速度减慢。
相反,可以选择凸轮表面530,使其具有向轮毂向内拉动凸舌的均匀速率。可选地或另外,与不同凸耳202相关的凸轮表面528和/或530可以具有不同的轮廓。例如,与凸耳202(4)E相关的凸轮表面528和/或530可以具有与凸耳202(4)D相关的凸轮表面528和/或530不同的轮廓。
从一个角度来看,控制器设备110可以包括用于低成本周长变化机制的独特机电设计,以用于形状输出和触摸/压力传感。为了实现这一目标,控制器设备110(1)可以提供多个堆叠的膨胀组件116,其可以围绕圆柱形渲染区域360度挤出。尽管渲染曲面可以是径向对称,但减少的自由度大大减少了在给定渲染体积下使用的电机数量。
另外,控制器设备110可以快速渲染一组不同的可区分形状,并且可以通过与渲染形状的物理交互来支持用户输入。在一个实现中,从最小周长到最大周长的约0.1秒的渲染时间可以容易实现,并且允许膨胀组件116在用户释放虚拟对象并伸手抓取另一虚拟对象时快速改变大小。除了快速渲染时间外,控制器设备同时可以承受人的抓取力,同时保持表面背面的可操纵性,从而最大限度地提高交互性。
上述部件可以使用各种材料制造,例如聚合物和/或金属,并利用各种技术,例如机加工、成型、添加剂制造等。滚珠轴承和紧固件可以从商业来源获得。
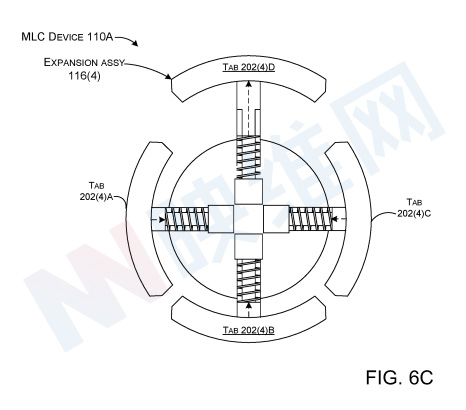
图11示出了用户握持虚拟杯子时的控制器状态。响应于用户握持虚拟对象,系统可以根据虚拟杯子的形状来依次令特定的膨胀组件膨胀,例如由下至上地逐渐增加膨胀系数,从而模拟出杯子的虚拟形状。
名为“Multilayer controller”的微软专利申请最初在2021年1月提交,并在日前由美国专利商标局公布。