微软专利为HoloLens 2研发低成本无源追踪控制器
追踪控制器
(映维网Nweon 2023年05月09日)微软认为,当前用于用户控制器的方法和系统相当昂贵,因为用户控制器必须包含与混合现实系统实时通信的有缘追踪系统。所以在名为“Rf retroreflector based controller tracking for vr headsets”的专利申请中,这家公司介绍了一种成本较低的无源控制器,并通过射频回射器和有源传感器系统(头显)来追踪无源控制器。
微软指出,所述无源系统提供了优于现有系统的诸多技术优势。例如,无源控制器系统在操作范围、尺寸和传输信号的频率方面相对便宜并且高度可定制。
另外,在混合现实系统中,无源控制器系统可设计为手持式遥控器,其可在用户的有源传感器系统(头显)的一臂长内进行追踪,使得有源传感器系统能够以亚毫米和亚弧度的精度追踪无源控制器系统的位置和方位(姿态)。

图1示出了有源传感器系统100和无源控制器系统120。在图1中描绘为头戴式设备的有源传感器系统100包括多个发射器104和多个接收器106。
图1同时示出了描绘为遥控器121的无源控制器系统120,其包括一个或多个无源回射器122。无源控制器系统120可选地包括一个或多个惯性测量单元(例如IMU 124)、用户输入控件126(例如设置在遥控器121的用户控制按钮)和其他I/O 128。其他I/O包括触觉反馈、麦克风、扬声器、光学传感器、发光组件或其他输入/输出。
要注意的是,无源控制器系统120不需要包括任何IMU或其他动力追踪单元来追踪控制器相对于有源传感器系统100的定向和/或位置。事实上,在大多数优选配置中,无源控制器系统120不包括和/或不使用IMU 124来相对于有源传感器系统100定位无源控制器系统。
相反,如果和/或当确定存在大量无线电干扰时,所述组件(例如,IMU 124)仅仅是可选的和/或可以选择性地用于供电和/或补充追踪,否则可能干扰用于无源控制器追踪的信号传输。
在这样的替代实施例中,系统可以基于分析在接收的传感器数据和/或基于用户输入或第三方输入来动态地检测干扰,并且可以响应地激活和/或使用来自IMU 124的IMU传感器数据来执行有源追踪。
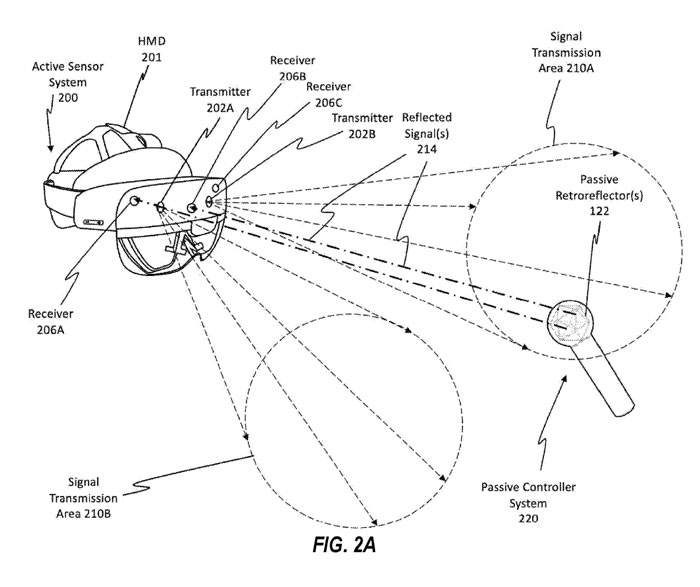
现在将注意力转向图2A-2B,其示出了用于检测无源控制器系统220相对于有源传感器系统200的定向和位置。所述有源传感器系统定位在距无源控制器系统预定距离内。
在实施例中,有源传感器系统200将一个或多个信号(例如在信号传输区域210A和信号传输区域210 B内)传输到无源控制器系统220,并且以这样的方式,使得一个或更多个信号作为一个或更多个反射信号214从无源控制器系统反射回有源传感器系统。
有源传感器系统200配置为接收和检测从附接到无源控制器系统220的多个回射器(例如无源回射器122)反射回来的一个或多个反射信号214。多个回射器配置在无源控制器系统220,以当无源控制器系统被定位在有源传感器系统的预定距离内时,将一个或多个信号反射回有源传感器系统200传输区域。
有源传感器系统200的一个或多个接收器(例如接收器206A、接收器206B和/或接收器206C)接收和检测一个或更多个反射信号214。有源传感器系统100然后能够基于一个或更多个始发信号来计算/确定无源控制器系统220相对于有源传感器系统的方位和位置在信号传输区域内,以及一个或多个反射信号214。
如图2A所示,由发射器202A和/或发射器202B发射的一个或多个信号在信号发射区域210A和/或者信号发射区域210内发射。如图2A所示,信号传输区域210A和信号传输区域210是分离和离散的信号传输区域。
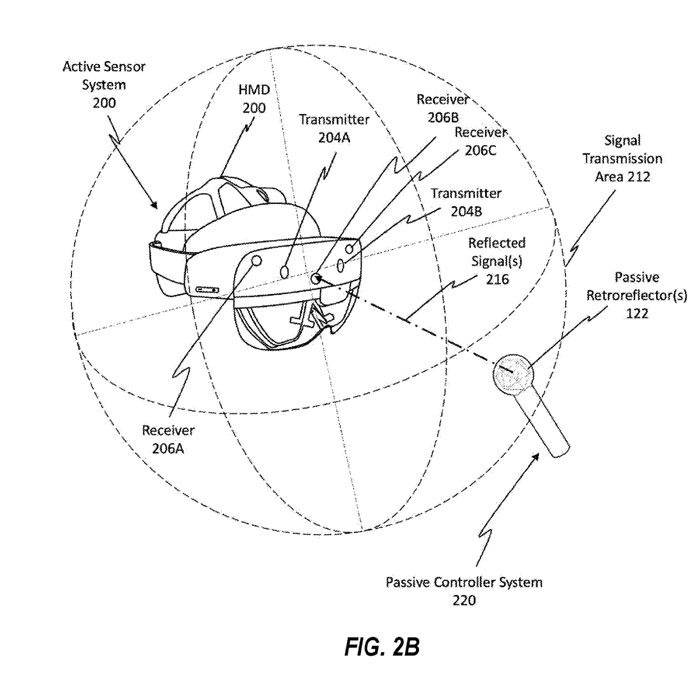
如图2B所示,有源传感器系统200包括多个发射器(例如发射器204A和发射器204B),发射器配置为在连续信号传输区域212内传输一个或多个信号,而当无源控制器系统220位于相对于有源传感器系统200的特定距离内时连续信号传输区域212覆盖用于向无源控制器系统220传输信号的球面范围的至少半球。
无源控制器系统220的多个回射器222配置为将信号传输区域212内的一个或多个信号作为一个或更多个反射信号216反射回有源传感器系统200的多个接收器。
在其他实施例中,信号传输区域围绕有源传感器系统200超过一个半球,并且在通过围绕有源传感系统200的全球面覆盖,例如通过将更多的发射器定位在头显200的不同部分和/或与头显200通信的辅助设备周围。

现在将注意力转向图3,图3示出了使用有源传感器系统304来追踪有源传感器系统302的预定距离308内的无源控制器系统306。
无源控制器系统306包括主体312A,主体312A配置为被握在用户302的手中并且配置为在六个自由度中与用户的手一起移动。在这方面,无源控制器系统306可以视为六自由度控制器。
无源控制器系统306同时包括多个附接到主体312的回射器310,所述回射器的配置提供至少180度的反射表面,以用于当无源控制器系统定位在与具有定向的雷达信号源相距预定距离308内时,在至少180度球面范围内反射雷达信号。
无源控制器系统被定位在距雷达信号源预定距离308内,其方位在相对于雷达信号源(例如有源传感器系统304)的360度球面范围内。
有源传感器系统304和无源控制器系统306之间的预定距离308在约0.01米至约4米的范围内(或具有半径)。在替代实施例中,预定距离308的范围可以延伸超过4米和/或在小于0.01米的范围内。
应当理解,由如图2A-2B所示的有源系统产生和传输的信号是可调谐的,这取决于无源控制器系统的尺寸和/或无源控制器系统与有源传感器系统之间的预定距离。例如,信号的范围从大约60GHz到大约100GHz,或者更广泛地,在24GHz到大约110GHz之间。
特别地,60GHz是合适的射频,因为它在短范围内保持信号功率,例如用户的一臂长(例如,在0.1到1.1米之间)。60 GHz可用于更长的范围,最高可达约4米。增加射频(例如110GHz)允许回射器更小。这些频率和相应的后向反射器尺寸允许有源传感器系统获得无源控制器系统的亚毫米和亚弧度追踪精度。

现在将注意力转向图4,图4示出了可在六个移动自由度内追踪的无源控制器系统400。如图4所示,无源控制器系统400包括控制器主体402,控制器主体402包括手柄基座406和设置在控制器主体的外部上的多个用户输入控件408。
无源控制器系统400同时包括多个回射器404,回射器被配置为将有源传感器系统产生的一个或多个信号反射回有源传感器系统。应当理解,控制器主体402由无线电透明的材料组成,使得它允许从有源传感系统传输的信号到达容纳在控制器主体402内的一个或多个回射器。
无源控制器系统400配置为使得用户能够用一只或多只手握住控制器主体402,以便使无源控制器系统移动至少六度。例如,用户能够在x方向410、y方向412和/或z方向414上移动无源控制器系统400。另外,用户能够在不同位置改变无源控制器系统的方位。
用户能够移动无源控制器系统400。因此,用户能够通过倾斜、转动和/或旋转无源控制器系统400来改变无源控制器系统的姿态(即方位)。无源控制器系统400的不同取向决定了多个回射器404的取向和有效信号反射表面积。
尽管无源控制器系统400可以具有总的信号反射表面积,但取决于无源控制器系统的定向,多个回射器可以定位和/或定向为使得可用的信号反射表面面积小于可用的总反射表面面积。
多个回射器404以配置的方式设置在无源控制器系统400上和/或内,以便使相对于有源传感器系统的可用信号反射表面积最大化。例如多个回射器404设置在无源控制器系统400上和/或内,使得当无源控制器系统位于有源传感器系统400的预定距离内时传感器系统。
用户输入控件408布置为使得当用户握住无源控制器系统400时,用户能够使用一个或多个手指与用户输入控件406交互,以向无源控制器系统提供用户输入,并用于例如在混合现实环境中控制对象和/或与对象交互。特别地,由控件生成的用户输入用于表示和/或影响用户与混合现实的交互。

图5示出了多个回射器500的示例性实施例。如图5所示,多个回射器500包括回射器502A、回射器502 6、回射器502C、回射器502D、回射器502E、回射器502F、回射器502G、回射器502H、回射器502I、回射器502J和/或一个或多个其他回射器。
每个回射器包括多个反射表面,例如反射表面504A、反射表面504B和反射表面504C。在这样的实施例中,一个或多个回射器配置为角回射器,其中多个反射表面配置为正交连接的平面,部分地形成具有中心点506的金字塔结构和/或棱镜。
在一个实施例中,多个回射器中的每个回射器包括基本相似的表面积和尺寸。每个单独的后向反射器配置为包括至少三个或更多个反射平面的角反射器。每个平面的至少一个点连接到另一个平面的一个点,使得角反射器具有至少一个单点或顶点。平面连接的角度可根据角反射器的工作频率和尺寸进行调整。
在一个实施例中,多个后向反射器包括可拆卸地连接到主体的单个集成反射器单元。附加地或可替换地,多个回射器500中的一个或多个回射器可单独地从一个或更多个其他回射器上拆卸。多个回射器可配置为提供360度的信号反射表面积。附加地或可替换地,多个回射器可配置为提供各种范围的总信号反射表面积,包括至少90度、至少180度和/或至少270度的信号反射表区域。
如图5所示,多个回射器中的每个回射器都连接到主体上,使得每个回射体的反射角是唯一的反射角。其中,反射角与多个回反射器中的至少两个不同回射器的反射角不重叠。在一个实施例中,多个回射器中的第一回射器的第一反射角与多个回反射器中的第二回射器第二反射角重叠。
如图5所示,多个回射器中的每个回射器由相同的材料组成。但需要注意的是,每个单独的回射器和/或单独的回射器的一个或多个反射表面可定制,使得在多个回射器的不同部分中使用不同的反射材料。
在任一配置中,用于多个回射器的材料比皮肤更具反射性。并且比预定范围内的其他物体的材料更具反射性。回射器比其他人类和非人类物体更具反射性,部分原因是雷达“看到”的横截面与单个回射器的边长成比例。
因此,回射器是可调的,以在使用无源控制器系统的已知环境中克服不同尺寸的物体。因为后向反射器(例如配置为角反射器)的有效截面大于可能出现视线中的物体,所以有源传感器系统依然能够追踪无源控制器的位置,因为信号依然以比干扰物体更大的幅度从无源控制器系统反射。
在一个实施例中,用于形成或涂覆回射器的材料具有至少10Ω的金属级电导率或其他电导率。用于后向反射器涂层的合适材料包括铂、金、银和铜等。然而,可以使用其他金属和反射材料。
在一个实施例中,多个连接的回射器包括回射器组件,包括多个定位成与每个相邻回射器直接接触的邻近回射器,以便在相邻的回射器之间不提供任何开放的间隙或空间,并且使得由连接的回射体提供的有效反射表面积是相对连续的。
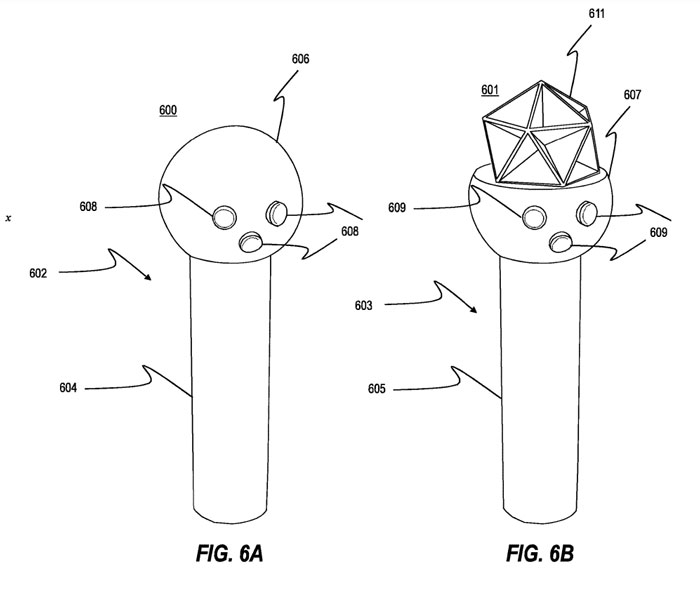
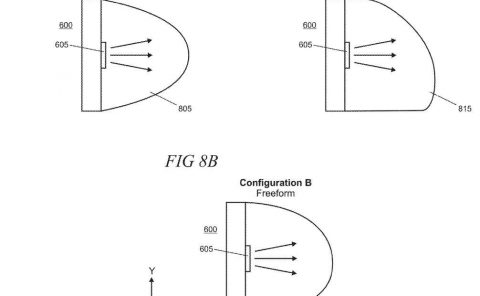
图6A-6B示出了无源控制器系统的前视图。如图6A所示,无源控制器系统600包括控制器主体602,控制器主体602包括手柄基座604和顶部606,其中用户输入控制器608设置在控制器主体602上的顶部606上和/或附近。
在这样的实施例中,无源控制器系统600包括多个回射器(在图6A中不可见),回射器被封装在主体的外壳内,并且使得从控制器主体602外部看不到多个回反射器。
尽管不可见,但回射器仍然能够反射在控制器处接收到的信号(使得入射和反射信号能够通过主体的相对不反射的外壳)。为了实现这样的配置,控制器主体由相对不反射的材料组成,例如像塑料这样的非金属材料。
如图6B所示,无源控制器系统601包括控制器主体603,控制器主体603包括手柄基座605和顶部607,其中用户输入控制器609被设置在控制器主体603上的顶部607上和/或附近。
在这样的实施例中,无源控制器系统601包括多个回射器,所述回射器仅部分地封装在主体的外壳内,以最小化来自主体或主体内的单独电子部件(例如控制按钮处理器、电源、收发器、传感器等)的任何可能信号干扰。
相关专利:Microsoft Patent | Rf retroreflector based controller tracking for vr headsets
名为“Rf retroreflector based controller tracking for vr headsets”的微软专利申请最初在 提交,并在日前由美国专利商标局公布。