微软AR/VR专利用电感和电容谐振驱动最小化面部追踪功耗
最小化面部追踪所需功耗
(映维网Nweon 2023年07月31日)对于XR设备,为了更长的续航和便携性,需要实现低功率和更小的形状参数设计。但随着面部追踪的普及,这项功能可能会消耗大量电力。
在名为“Resonant drive system for rf face tracking”的专利申请中,微软介绍了一种最小化面部追踪功耗的方法。这家公司指出,电感和电容(LC)谐振驱动是最小化面部追踪功耗的好方法。由于驱动器电感和感测电容的LC谐振频率,由此产生的驱动信号可以在目标频率增强,从而提高设备的可靠性和安全性。
面部追踪系统的传感电容取决于传感天线与被追踪面部皮肤之间的距离。由于面部肌肉的运动,距离会随着面部表情的变化而变化。用于面部追踪驱动器的传统LC谐振驱动电路需要高功耗,因为要通过可能集成到微处理器或ASIC中的模数转换器ADC处理的感测信号应该尽可能大,从而实现更高的分辨率。
传统的驱动电路使用快速和低失真运算放大器,而这非常耗电。然而,使用LC谐振驱动电路与直流(DC)到交流(AC)转换器可能是最好的方法,因为它可以实现大幅度的传感信号,而不需要高功耗。半桥电路可以集成到ASIC中,以帮助减少传感器解决方案的面积。
使用半桥驱动器的传统DC-AC转换器需要一个线性稳压器或数模转换器DAC作为输入源,因为输入信号应该根据目标输出信号的幅度进行相应的调整。然而,由于大量的静态电流,所述电路存在线性功率损耗。
微软认为,用于射频RF面部追踪的数字控制谐振驱动方案可以成为MR可穿戴设备的一个优秀解决方案。

图1是数字控制谐振驱动系统100的框图,其中包括用于将直流电源110转换为交流电源的DC-AC转换器105。转换器105包括控制栅极驱动器112的逻辑电路111。栅极驱动器112在行113上向高晶体管M1 114的栅极提供VGH信号,并在行115上向低晶体管M2 116的栅极提供VGL信号。
VGI交替地打开和关闭晶体管,从而在导体117上产生交变输入信号LX。晶体管M1 114和M2 116作为半桥电路工作。
DC-AC转换器105可以产生具有峰值电压的交流电源。其中,峰值电压处于介于电池的直流电压和驱动系统100产生的峰值交流电压之间的中间水平。驱动系统100同时可以包括q控制滤波器,其使用串联电感120耦合以接收导体115上的交流信号。
所述电感120可以是常规电感120或多个电感耦合电感。与由面部追踪传感器天线130和面部皮肤135形成的电容125结合。
输出导体145携带包含放大的交流信号的输出,标记为SENSE_OUT 146的输出信号具有峰对峰幅度,由控制器150通过占空比控制对转换器105中的逻辑电路111进行调整,而不是DC- ac转换器105中的典型直流电压调整。控制器150包括在一个示例中可以从中计算峰值到峰值信号幅度的模拟到数字AC-DC转换。
在一个示例中,控制器150产生两个逻辑信号。一个占空比信号155,占空比RFFT是一个被修改以调整SENSE_OUT 146信号幅度的信号。
第二个逻辑信号是驱动频率信号RFFT_FREQ 156,它设置导体115上驱动信号的总频率。
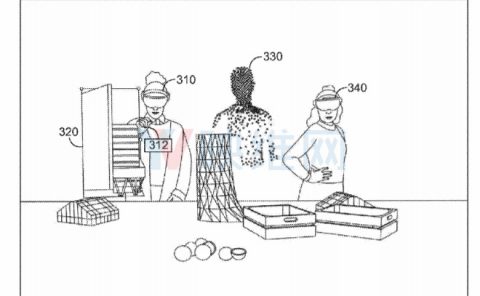
天线130可以是在面部追踪系统140中使用的电容追踪。所述系统140可以包括图1所示集成到框架中的电路,所述框架还可以包括诸如电池的电源110。
显然,厂商希望将这种电路的重量和尺寸最小化以优化佩戴者的舒适度。同时,电池应该有足够的电量来运行系统140适。
系统140可包括多路复用器165,以交替驱动表示在170和175处的进一步传感器。由于传感器中的每一个交替地与它们邻近的表面形成感测电容器,当每个传感器通过多路复用器165耦合到剩余电路时,占空比将被修改。
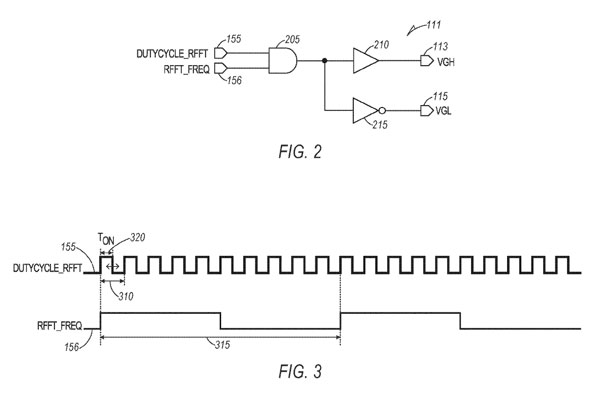
图2是逻辑电路111的逻辑框图。放大器210简单地提供来自与门205的逻辑信号,而放大器215则反转来自与门205的逻辑信号。放大器210提供VGH 113,而反相放大器215提供VGL 115。
图3是时序图,说明占空比信号。半桥电路可以与处理电路集成在ASIC中,而不需要高电源。由于逻辑电路相当简单,可以减少布局面积和提高功率效率。
通过占空比控制,可以调节直流-交流变换器的输入幅值,以满足系统的目标交流信号幅值。谐振频率随传感器电容125的变化而变化。驱动电路、转换器105在固定输入频率下的输出的增益和相位将随着改变输出信号146的感测电容变化而相应改变。
由于谐振频率处的峰值增益,可以在很小的输入信号下实现非常大的输出信号幅度。
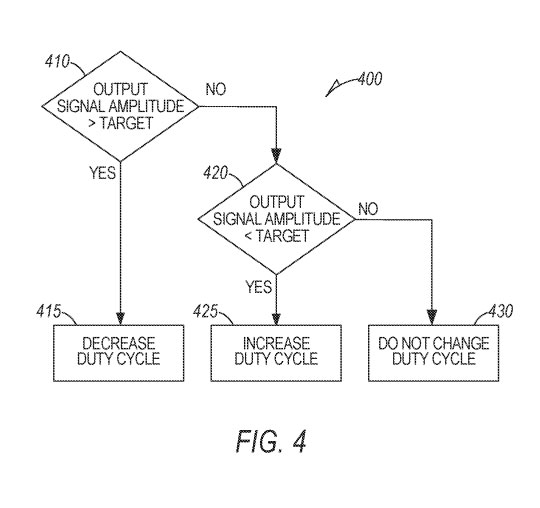
图4是示出基于输出信号幅度与目标幅度的比较来控制占空比的方法400的流程图。方法400可以通过控制器150中的软件或通过硬件或两者的组合来实现。在一个实例中,目标幅度可以固定在提供用于传感的最佳幅度,同时使电池110的能量消耗最小化的幅度。
在操作410时,将输出信号幅度与目标幅度进行比较,例如20伏的峰值与峰值之间的比较,以确定输出信号幅度是否大于目标幅度。
其它峰对峰目标幅值可用于进一步的示例中。
如果操作410为是,则在操作415降低占空比频率,并且处理返回操作410以定期执行进一步检查。如果不是,则将输出信号幅度与目标幅度进行比较,以确定输出信号幅度是否小于目标幅度。
如果是,则在操作425时增加占空比,并返回操作410以定期进行进一步检查。如果不是,则在操作430时不改变占空比,并返回操作410进行周期性的进一步检查。
在一个示例中,可以改变占空比以提供所需的目标电压。占空比最终成为所需有效电压的函数。例如,给定3.3伏的电源110,如果期望的信号幅度为1伏,则占空比将是该1伏除以3.3伏的函数。
变化可以用同样的方式计算。如果低于目标幅度0.1伏,则占空比可增加0.01除以3.3伏。在一些示例中,如果每个传感器有足够的周期以允许较慢的收敛,则可以使用小于该增量的增量以更慢地收敛于目标幅度。
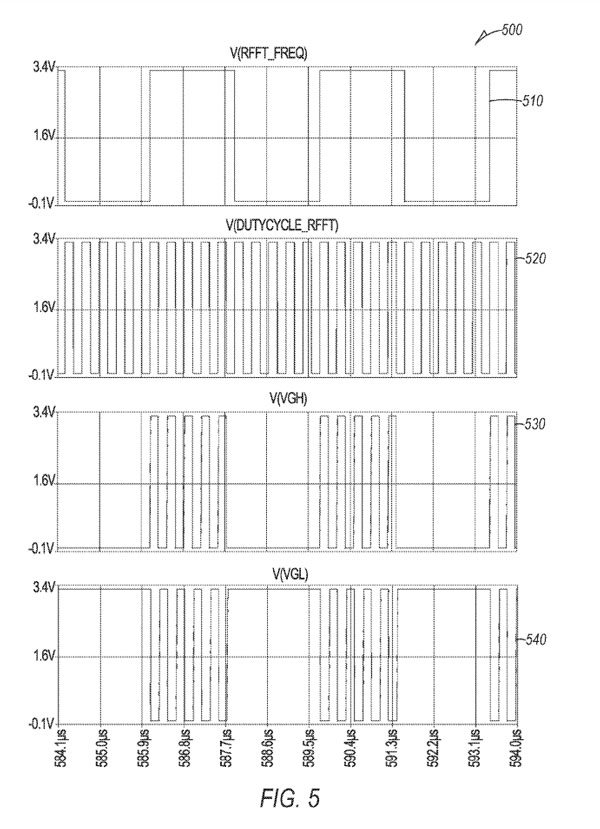
图5是示出通常在500点处的控制信号的时序图。轨迹510说明了驱动频率信号电压V(RFFT_FREQ 156)。
轨迹520说明占空比信号电压V(DutyCycle_RFFT 155)。VGH信号113电压显示在迹线530,VGL信号115电压显示在迹线540。
当驱动频率信号较低时,VGH较低;当驱动频率信号较高时,VGH随占空比信号追踪。VGL是从VGH反转过来的。如图1所示,VGH和VGL分别通断和关断晶体管M1 114和M2 116。
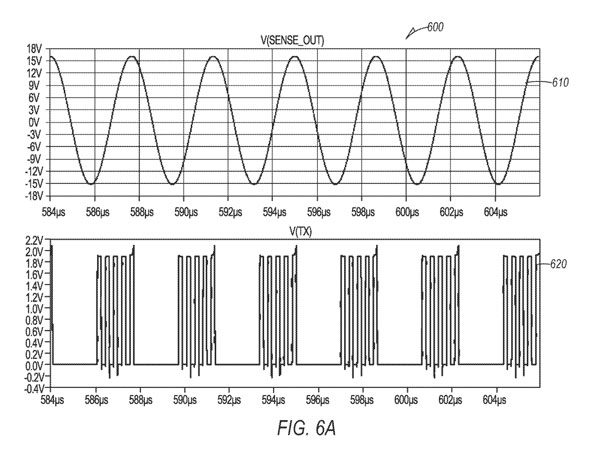
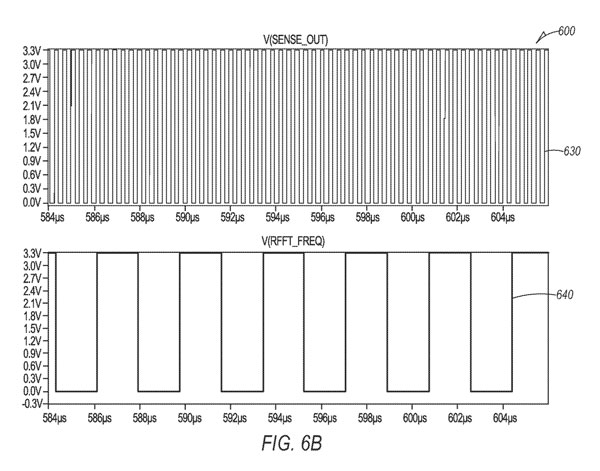
图6A和6B时序图表示谐振频率下的瞬态响应和相应的控制信号。轨迹620是从晶体管M1 113和M2 116输出的电压。轨迹是电感120和感测电容125组成的LC谐振电路产生的输出信号电压V。占空比信号电压显示在轨迹630,驱动频率信号电压显示在轨迹640。
谐振驱动系统100可以消除由于DC- ac驱动信号转换引起的线性功率损耗或为DC- ac转换器电路提供直流电压的线性稳压器中的功率损耗,因为谐振驱动系统的输出信号幅度是通过固定直流输入源160的占空比控制来调节。
系统100能以低功耗实现被测信号的放大,而固定直流电压源可作为直流-交流转换电路的输入。所述输入信号117可通过占空比控制进行调节,同时所述谐振驱动电路包括所述半桥电路以及所述栅极驱动器112的电感和逻辑111。
这避免了输入电源的线性功率损耗,并延长了电池续航。换句话说,MR可穿戴设备的低功耗面部追踪解决方案可以通过数字控制谐振驱动系统100来实现。
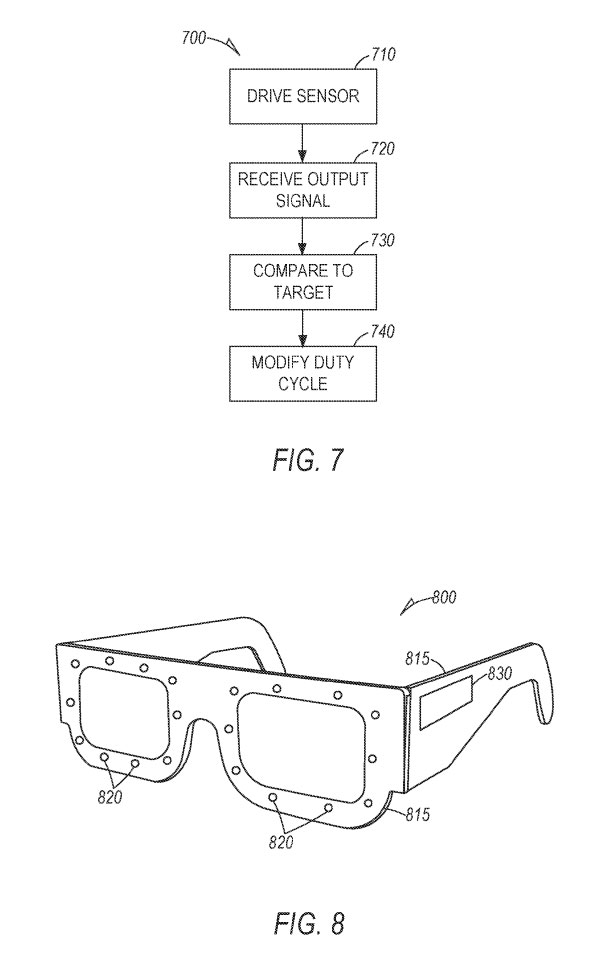
图7是用于一个或多个面部追踪传感器的控制输出信号幅度的流程图。
710,通过用由数字控制谐振驱动电路产生的交流输入信号驱动面部追踪传感器。
720,从面部追踪传感器接收输出信号。
730,将输出信号的幅度与目标幅度进行比较。
740,修改谐振驱动电路的占空比以控制输出信号。
修改占空比包括响应于大于目标幅度的输出信号的幅度而减小占空比。当输出信号的幅值小于目标幅值时,增加占空比以增加对传感器的驱动信号。
通过执行占空比数字信号和驱动频率数字信号的逻辑与来产生第一数字输入信号,从而用交流输入信号驱动面部追踪传感器。然后,驱动耦合到LC谐振电路的半桥式晶体管对来产生交流输入信号。
在一个示例中,驱动频率数字信号保持恒定,并且占空比具有约为驱动频率数字信号频率的十倍的标称频率。
图8是用于眼动追踪的系统800的框图。系统800可以包括以一副眼镜810的形式的头显设备。眼镜810具有一个框架815,而框架815包括多个面部追踪传感器。
框架815同时可以包括如图1所示的数字控制谐振驱动电路830,其用于向面部追踪传感器820提供交流输入信号。
电路830同时包括耦合到接收来自面部追踪传感器820的输出信号的控制器。如前所述,控制器将输出信号的幅度与目标幅度进行比较,并修改谐振驱动电路的占空比以控制输出信号。
相关专利:Microsoft Patent | Resonant drive system for rf face tracking
名为“Resonant drive system for rf face tracking”的微软专利申请最初在2021年12月提交,并在日前由美国专利商标局公布。