微软AR/VR专利探索左右眼立体图像的对齐解决方案
对齐评估
(映维网Nweon 2023年10月31日)对于呈现立体图像的XR头显,图像显示时存在的任何立体错位都会减损用户体验,甚至会引起恶心。所以,有必要进行对齐评估。在名为“Head-mounted display alignment assessment”和“Stereo alignment assessment for head-mounted display”的专利申请中,微软就提出了一种相关的对齐评估方法。
3A和3B说明了头戴式显示系统的组件不对齐的场景。右侧近眼显示器200R相对于左侧近眼显示器200L是不对齐的,具体来说,右侧近眼显示器偏移了大约10度。所以在图3B中,两个显示图像不解析为单个三维对象206,而是视为两个不同的偏移图像。
往好了说,这可能会分散注意力,往坏了说,这可能会给用户带来不适感和恶心感。因此,图4描述的头戴式显示系统400包括用于评估左右显示光的当前立体对齐的结构。
如图所示,用于形成显示图像的空间调制显示光操作可由逻辑机器控制406。逻辑机同时可以检测头戴式显示系统的各种组件之间的不对齐。逻辑机可以配置为评估由各自的左右显示组件提供的左右显示光的立体对齐。
这可以至少部分地基于以下分析来完成:由左和右光学传感器测量的左和右测试光,以及由左和右IMU测量的左和右显示组件的方向。
所以,头戴式显示系统400的各种结构可用于检测呈现虚拟图像的左右显示光之间的立体不对齐。
图5示出用于显示系统对齐评估的示例方法500。

在502中,在头戴式显示系统的左侧显示组件,发射左侧显示光和左侧测试光,左侧显示光通过左侧波导耦入并耦出,以在左侧视窗查看。图6更详细地图解了左波导402L和头戴式显示系统400的相关组件。
在图6中,左显示组件404L包括用于释放左侧显示光602D的第一左瞳600D。左侧显示组件进一步包括用于释放左侧测试光602T的第二左瞳600T。
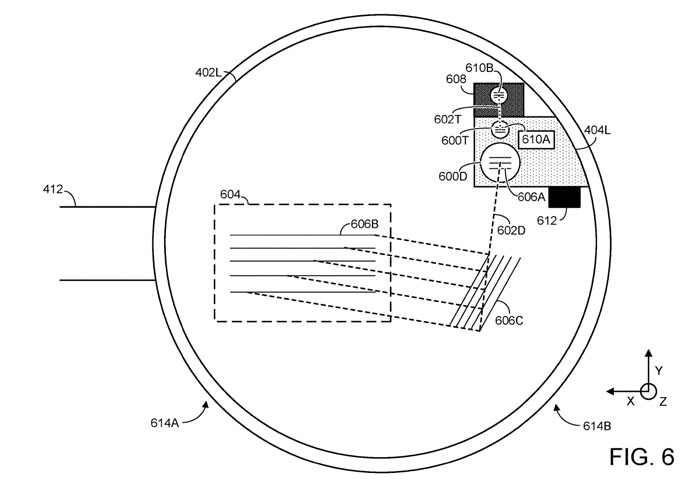
左波导402L配置为耦入来自左显示组件的左侧显示光,并将用于在左视窗604查看的左侧显示光耦出。左侧显示组件404L进一步提供左侧测试光602T。
在一个实例中,显示光和测试光可以来自显示组件内的单独光源,由显示组件的单独光瞳释放。在这种情况下,测试光的特性可能以任何合适的方式与显示光不同。
头戴式显示系统同时包括一个用于测量左侧测试光的左光学传感器608。以这种方式,头戴式显示组件的逻辑机可以评估左显示组件和左波导之间潜在的不对齐,从而以检测左右显示图像之间的立体不对齐。
在图6的实施例中,左波导402L配置为将左侧测试光耦合并将左侧测试光耦出,以供左侧光学传感器感测。
这是通过测试光衍射光学元件610A和测试光测试光衍射光学元件610B实现,测试光测试光衍射光学元件610A将测试光耦入到波导,测试光测试光衍射光学元件610B将测试光耦入到波导,并通过左光学传感器进行测量。
另外,将左侧光学传感器608耦合到左侧显示组件。由于左侧测试光通过波导传播,左侧显示组件和波导之间的不对齐可能会影响左侧光学传感器接收左侧测试光的角度和/或位置。
在图6的示例中,头戴式显示系统进一步包括左IMU 612。左IMU配置为测量左显示组件的方向。可以将来自左IMU的测量值与来自对应于右显示组件的右IMU的测量值进行比较。通过这种方式,头戴式显示系统的逻辑机可以评估左显示组件和右显示组件的相对方向和/或位置,并检测两个显示组件之间的不对齐。
在图6中,左侧IMU与左侧显示组件物理耦合。通过这种方式,左侧IMU可以直接测量左侧显示组件的方向和/或位置的变化。
在一个实施例重,头戴式显示系统可以包括第二个左IMU,并配置为测量左波导的方向。在图6中,第二左IMU 613配置为测量左波导的方向。IMU 613用虚线表示,表明头戴式显示系统不需要总是包括第二个左IMU。
在使用第二个左IMU的情况下,头戴式显示系统可以省略左光学传感器,并且显示组件仅提供显示光,而非显示光和测试光。
回到图5,在504,头戴式显示系统的右侧显示组件发射右侧显示光和右侧测试光,右侧显示光通过右波导耦入并耦出。在一个示例中,这基本上按照上述图6的左波导描述方法完成。
图7更详细地描述了方法500的步骤504。在图7中,头戴式显示系统包括右显示组件702,右显示组件702配置为提供右侧显示光704D和右侧测试光704T。
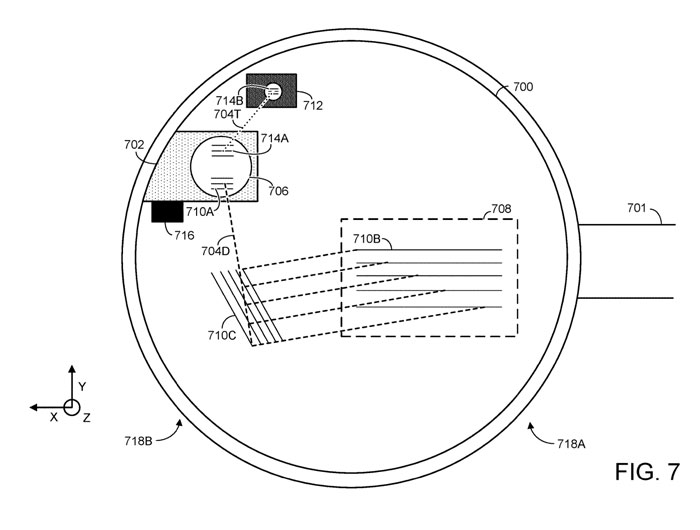
与左侧显示组件404L不同,右侧显示组件702包括用于释放右侧显示光和右侧测试光的共享光瞳706。但如上所述,右侧显示组件可替代地包括用于释放右侧显示光的第一右瞳和用于释放右侧测试光的第二右瞳。
在本例中,显示组件沿着波导的表面布置,更靠近用户眼睛。在其它示例中,显示组件可沿着波导的相对表面与用户眼睛设置。
与左波导402L类似,右波导700配置为耦合来自右侧显示组件的右侧显示光,并将右侧显示光耦出,以便在右视窗708查看。
这可以通过如上所述的合适衍射光学元件来实现。波导700包括第一右侧衍射光学元件710A和第二右侧衍射光学元件710B。
在图7中,头戴式显示系统进一步包括用于测量右侧测试光的右侧光学传感器712。但与左侧光学传感器608不同,右侧光学传感器712耦合到右侧波导,而不是耦合到右侧显示组件。
右光学传感器可以耦合到波导的任何一边。将波导移到离用户眼睛较近的一侧,或移到离用户眼睛较远的波导另一侧。或者如上所述,右侧光学传感器可以耦合到右侧显示组件,类似于左侧光学传感器608。在任何情况下,与右侧显示光一样,可以将右侧波导700配置为耦合右侧测试光704T,并将右侧测试光耦出,以便通过右侧光学传感器712进行传感。
在图7中,头戴式显示系统进一步包括配置为测量右侧显示组件的方向的右侧IMU 716。可以将右侧IMU的输出与左侧IMU(的输出进行比较,以评估一个显示组件与另一个显示组件之间的潜在不对齐。
为此,在图7中,右侧IMU物理耦合到右侧显示组件。所以,当右侧显示组件的位置和/或方向发生变化时,右侧IMU可能会检测到这种变化。
同样,头戴式显示系统可包括第二右IMU。图7示意性地示出配置为测量右波导方向的第二右IMU 717。IMU 717用虚线表示,表明头戴式显示系统不需要包括第二个右IMU。
回到图5,在506,在靠近左侧显示组件的左侧光学传感器处测量左侧测试光。在508,在靠近右侧显示组件的右侧光学传感器处测量右侧测试光。
换句话说,如上所述,每个左右显示组件提供各自的左侧和右侧测试光,并由各自的左侧和右侧光学传感器测量。例如,在图6中,左侧测试光602T由左侧显示组件404L提供,并由左侧光学传感器608测量。在图7中,右侧显示组件702提供的右侧显示光704T由右侧光学传感器712测量。
显示组件与其相应波导之间的任何偏差,如果影响显示组件提供的显示光,这同样可能影响光学传感器处测试光的测量,从而允许头戴式显示系统的逻辑机能够检测到偏差。
相关专利:Microsoft Patent | Head-mounted display alignment assessment
相关专利:Microsoft Patent | Stereo alignment assessment for head-mounted display
名为“Head-mounted display alignment assessment”和“Stereo alignment assessment for head-mounted display”的微软专利申请最初在2022年2月提交,并在日前由美国专利商标局公布。