微软AR/VR专利提出单反射镜在非双云台结构下的多方向扫描
扫瞄镜
(映维网Nweon 2024年01月30日)扫描镜可用于不同类型的光学设备,例如头显设备。其中,头显设备的飞行时间深度传感系统可以利用一个或多个微机电系统(MEMS)反射镜将光照直接照射到环境中,而所述深度图像的每个像素可以表示到所述环境中相应点的距离。
扫描反射镜系统可以包括两个反射镜并分别沿横向轴旋转以扫描光。在每个旋转轴使用单独的反射镜有助于提供稳定性和控制,因为能够防止离轴运动。但是,包含两个或更多反射镜的系统比基于单个反射镜的系统更大。
对于其他方案,可以将一个反射镜可以安装在双云台结构中。其中,反射镜悬挂在内云台内,而内云台嵌套在外云台内。通过这种方式,可以控制反射镜在多个方向扫描光线。然而,控制反射镜的方向是一个挑战。另外,用于检测反射镜方向并向控制器提供反馈的电线或其他电气导管可能由于内云台和外云台的运动而容易发生应变和断裂。
在名为“Scanning mirror device”的专利申请中,微软提出了一种解决方案,其中,单个反射镜可以在不使用双云台结构的情况下向多个方向扫描。
简而言之,两对或更多对致动器连接到支撑反射镜的支架。每一对致动器可操作地配置为相对于两个或多个不同旋转轴中的一个倾斜镜。这使得反射镜可以在不同的方向进行可控的扫描,例如将入射光引导成光栅模式。
有利地,致动器可用于将反射镜倾斜到目标方向。在深度传感系统中,图像传感器使用定位光学元件形成照明环境的深度图像,所以不需要通过反射镜的精确光方向。另外,发明描述的致动器布置可以使得扫描镜装置比其他扫描镜装占用更少的空间。
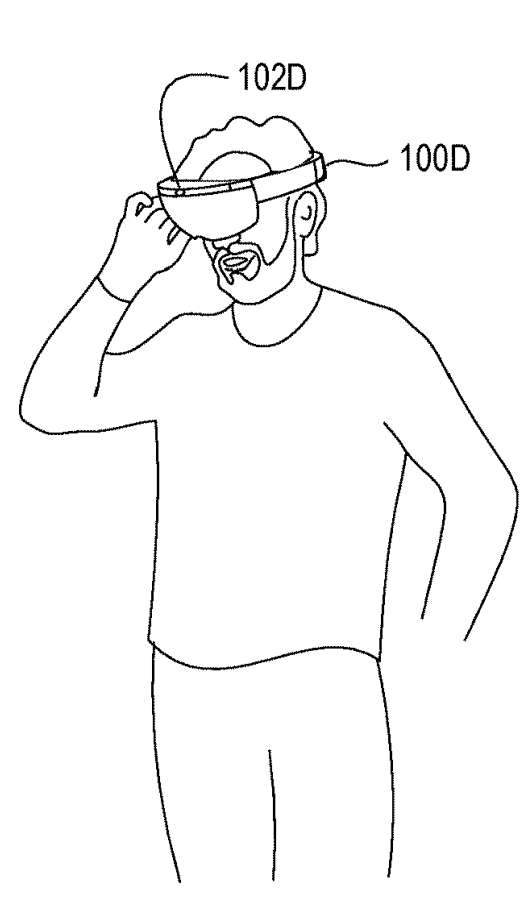
图1示出了可在深度传感系统中使用扫描镜装置的示例性电子设备。设备100D是一个包括深度传感系统102D的头显。
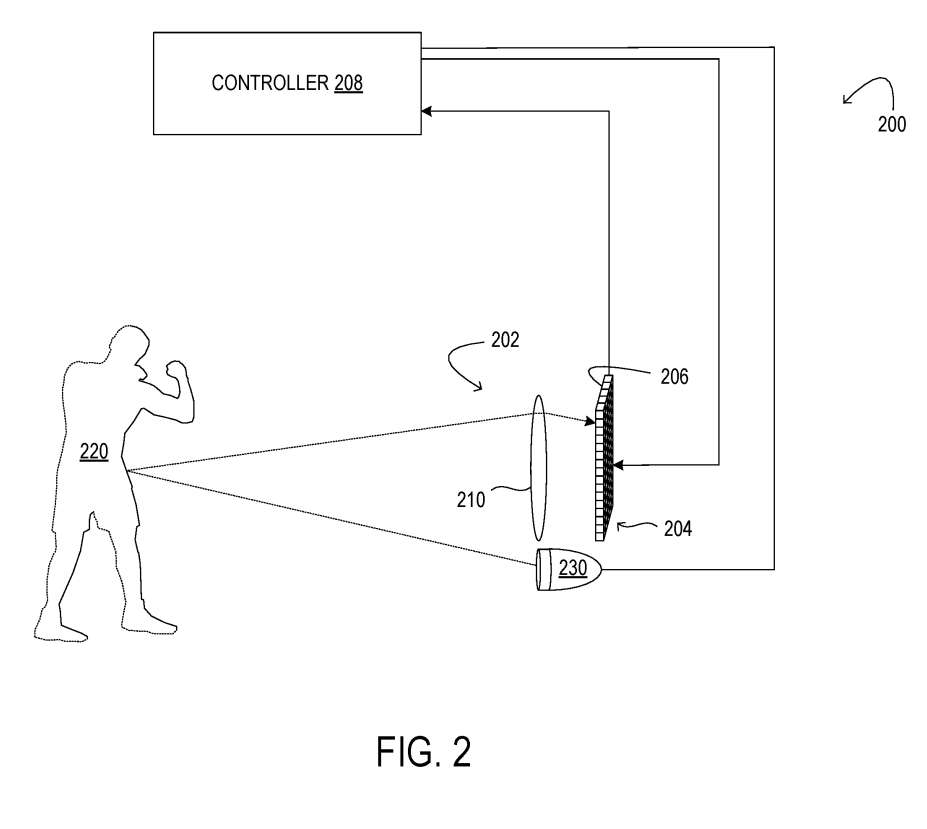
图2示出可利用扫描镜系统的示例飞行时间(ToF)深度成像系统200的示意图。ToF深度成像系统包括ToF摄像头202。
ToF摄像头202包括传感器阵列204,传感器阵列204包括多个ToF像素206,每个像素206配置为获取光样本,控制器208和物镜系统210配置为将目标220的图像聚焦到传感器阵列204。控制器208配置为收集和处理来自传感器阵列204的ToF像素206的数据,从而构建深度图像。
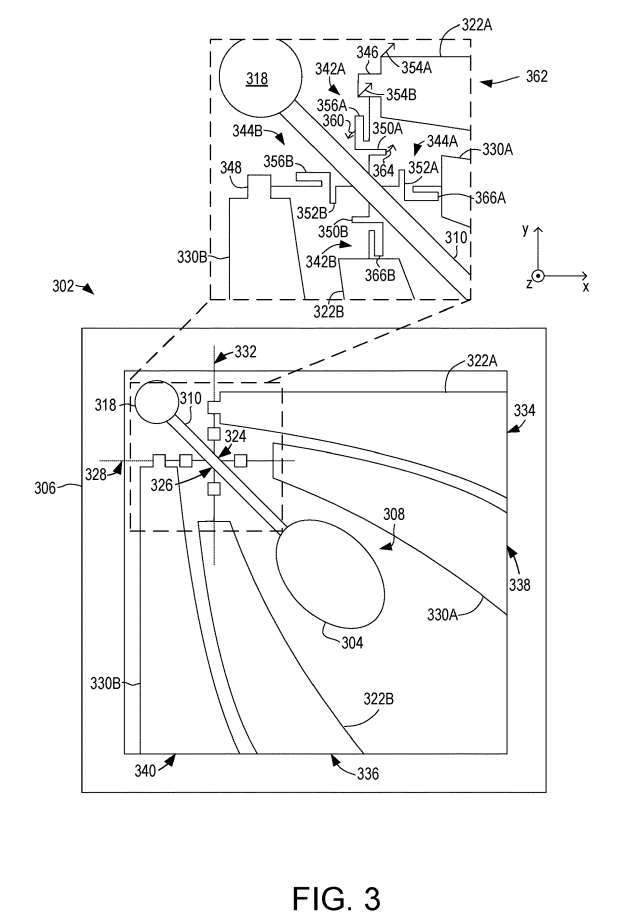
图3示出扫描镜装置302。扫描镜装置302包括反射镜304,反射镜304配置成以可控方向反射入射电磁辐射,例如可见光、红外光或微波辐射。
所述反射镜304位于所述扫描反射镜装置302的框架306的中心区域的孔径308内。所述反射镜304位于孔径308的中心区域内,使得所述扫描反射镜装置302的其他组件能够围绕所述反射镜304布置。这样的配置可以占用更少的空间。
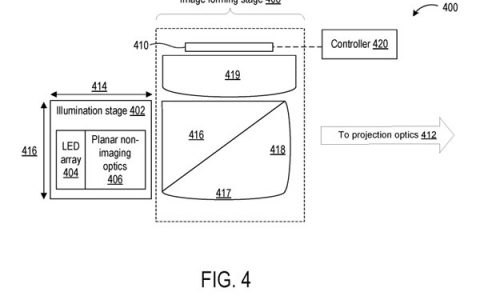
在其他实施例中,反射镜可位于扫描反射镜装置的任何其他合适区域。图4示出扫描镜装置402的另一示例。
与图3中的扫描镜装置302一样,扫描镜装置402同样包括反射镜404。但在图4中,反射镜404位于扫描反射镜装置402的帧406内的孔径408的一角。
如图4所示,这种配置可以提供不同的设计可能性。位于中心区域之外的反射镜可以配置具有相对较大的尺寸和/或可以配置具有不同的特性。
再次参照图3,所述反射镜304设置在反射镜支架310。在所描述的示例中,支架310采用杆的形式,但在其他示例中可以采用其他形式。支架310将反射镜304耦合到多个致动器,所述致动器被操作地配置为移动所述镜304。
在所描述的实施例中,反射镜支架310相对于扫描反射镜装置302的框架306的侧面呈对角线取向。所述反射镜支架310从所述光圈308的一个角落向所述光圈308的中心区域延伸。
扫描镜装置302同时包括配重318,配重318设置在与反射镜304相对的反射镜支架310。配重318可以帮助防止镜面304的重量使镜面支撑310偏离XY平面。配重318同时可以帮助防止反射镜的旋转从耦合到线性加速,从而稳定反射镜。
扫描镜装置302的配重318设置在最靠近框架306的支架310的末端。在其它实施例中,配重318可位于任何其它合适位置。例如,图4的扫描镜装置402包括位于支架406中心区域的配重418,其中配重418中心位于孔径408内。
扫描镜装置302同时包括第一致动器对,包括第一致动器322A和第二致动器322B。第一致动器322A位于反射镜支架310的第一侧324,第二致动器322B位于与反射镜支架310的第一侧324相对的反射镜支架310的第二侧326。
第一致动器322A和第二致动器322B沿旋转328的第一轴连接到反射镜支架310。第一致动器322A在与反射镜支架310相对的第一致动器322A的远端334处锚定在框架306,第二致动器322B在与反射镜支架310相对的第二致动器322B的远端336处锚定在框架306。
在一个实施例中,第一致动器322A和第二致动器322B各包括可通过施加合适电压来操作的压电材料。可以控制电压的施加以沿旋转328的第一轴旋转或倾斜镜支架310。
扫描镜装置302同时包括第二对致动器,包括第三致动器330A和第四致动器330B。第三致动器330A位于反射镜支架310的第一侧324。第四致动器330B位于反射镜支架310的第二侧326。第三致动器330A和第四致动器330B沿第二旋转轴332连接到反射镜支架310。
在一个实施例中,第三致动器330A在与反射镜支架310相对的第三致动器330A的远端338处锚定在框架306,第四致动器330B在与反射镜支架310相对的第四致动器330B的远端340处锚定在框架306。
以这种方式,第三致动器330A和第四致动器330B配置为使反射镜304围绕Y轴倾斜。在一个示例中,第三致动器330A和第四致动器330B各包括可通过施加合适电压来操作的压电材料。可以控制电压的施加以使反射镜支架310沿第二旋转轴332倾斜。
施加于操作第三致动器330A和第四致动器330B的电压可以与施加于操作第一致动器322A和第二致动器322B的电压相同或不同。
在一个实施例中,操作第三致动器330A和第四致动器330B,使其以与第一致动器322A和第二致动器322B相同的最大位移的一半移动。在沿两个轴之一需要较少位移的示例中(,这可以降低扫描镜装置的复杂性。
在一个实施例中,旋转328的第一轴和旋转332的第二轴与孔径308的中心区域相偏移。这使得所述致动器322A、322B、330A、330B围绕所述镜面304布置,并在转角314附近连接所述镜面支架310。因此,扫描反射镜装置302可以比致动器322A、322B、330A、330B和反射镜304的其他布置占用更少的空间。
在一个实施例中,328的第一个轴与332的第二个轴正交。例如,在图3的实施例中所示的旋转328的第一轴平行于x轴。第二轴旋转332平行于y轴。
以这种方式,驱动器可以控制反射镜在x轴和y轴方向扫描,而与使用非正交轴相比,离轴运动更少。
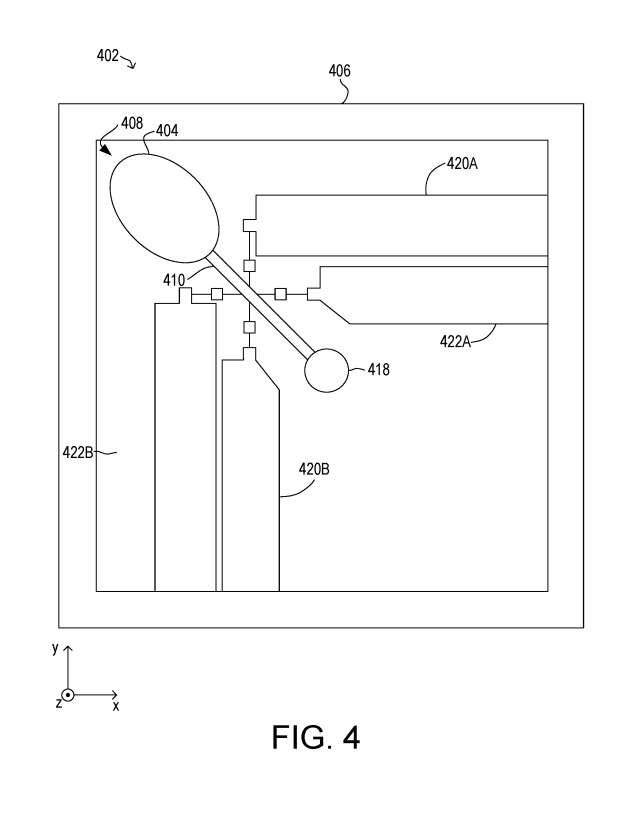
图4中的扫描镜装置400类似地包括沿第一旋转轴连接到反射镜支架410的第一致动器420A、420B对,以及沿第二旋转轴连接到反射镜支架410的第二致动器422A、422B对。
与图3的致动器322A、322B、330A、330B类似,图4的致动器420A、420B、422A、422B相对于反射镜支架410具有对角线镜面对称。这样的结构可以比其他结构占用更少的空间,例如具有致动器不对称方向的结构。
图3中的致动器322A、322B、330A、330B中的每一个,以及图4中的致动器420A、420B、422A、422B中的每一个都可以包括压电致动器。压电致动器的运动与施加在致动器的压电材料层上的电场大小成正比,电场大小会引起压电材料层的机械变化。
因此参考图3,与施加较低电压相比,对压电致动器施加较高电压会导致镜面304的位移更大。通过这种方式,致动器可以通过控制施加到致动器上的电压来使反射镜倾斜到目标方向。
继续图3,每个致动器通过连接器连接到反射镜支架。例如,第一致动器322A通过连接器342A连接到反射镜支架310。第二致动器322B通过连接器342B连接到反射镜支架310。第三致动器330A通过连接器344A连接到反射镜支架310,第四致动器330B通过连接器344B连接到反射镜支架310。连接器342A、342B、344A和344B示意图如图3所示。
每个连接器的扭转部分和弯曲部分配置为相对于线性弯曲和旋转扭转具有相对刚性。例如,弯曲部分相对于线性弯曲和扭转弯曲的刚度可以用连接器的弯曲模量和扭转模量表示。
当驱动反射镜沿x轴倾斜时,连接器344A和344B作为线性弯曲模式的致动力耦合器,连接器342A和342B作为扭转屈服模式的反射镜支撑。当y轴倾斜时,连接器的功能颠倒。当驱动到+x +y角时,连接器的弯曲和扭转模式混合并同时激活。频率响应范围可以通过使用更硬的连接器挠曲来增加。
参考连接器342A,致动器322A向上的致动器运动用箭头354A表示。连接到连接器342A的标签346在致动器322A的运动方向上相对刚性,因此以类似的方向和类似的幅度移动,如箭头354B所示。扭转部分356A定向于与致动器322不同的方向,并且由于致动器运动期间所经历的连接对称的性质而产生直接弯曲,但同时产生扭转模式。
由此,如箭头360所示,356A扭转部分发生了一定的扭转变形,同时传递了致动器向上的部分直线运动。这导致支架向负y轴方向倾斜(或沿x轴旋转)。这种倾斜会导致连接器344A和344B的扭转屈服,同时反射镜支架会发生倾斜。
扫描镜装置300、400各包括两对致动器。在其它示例中,所述扫描镜装置可包括任何其它合适数量的致动器和致动器的排列。
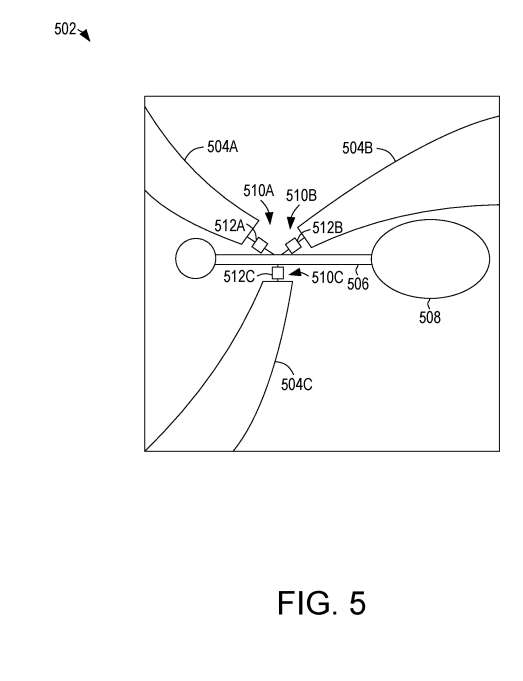
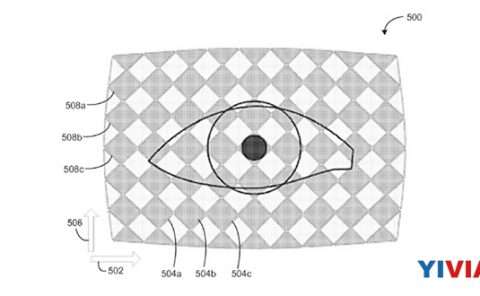
图5示出扫描镜装置502的示例,其包括以相对于反射镜支架的第一角度连接到反射镜支架506的第一致动器504A,以相对于反射镜支架的第二角度连接到反射镜支架506的第二致动器504B,以及以相对于反射镜支架的第三角度连接到反射镜支架506的第三致动器504C。
第一致动器504A通过第一连接器510A连接到反射镜支架506。第二致动器504B通过第二连接器510B连接到镜像支架506。第三致动器504C通过第三连接器510C连接到反射镜支架506。
所述连接器510A-510C中的每一个都可以类似于所述连接器342A、342B、344A、344B。例如,第一连接器510A包括第一挠性部分512A,第二连接器510B包括第二挠性部分512B,第三连接器510C包括第三挠性部分512C。这使得每个连接器都有足够的强度和刚度来传递致动器的运动来倾斜反射镜,同时有足够的灵活性来防止致动器对连接器施加超过连接器屈服强度或断裂强度的力。
可以控制第一致动器504A、第二致动器504B和第三致动器504C,使反射镜508向各种方向倾斜。在一个实施例示例中,第一致动器504A、第二致动器504B和第三致动器504C相距约120度。在其它实施例中,致动器504A、504B和504C可具有任何其它合适的相对取向。图5的三致动器结构可以允许比具有更多数量致动器的结构更紧凑的结构。
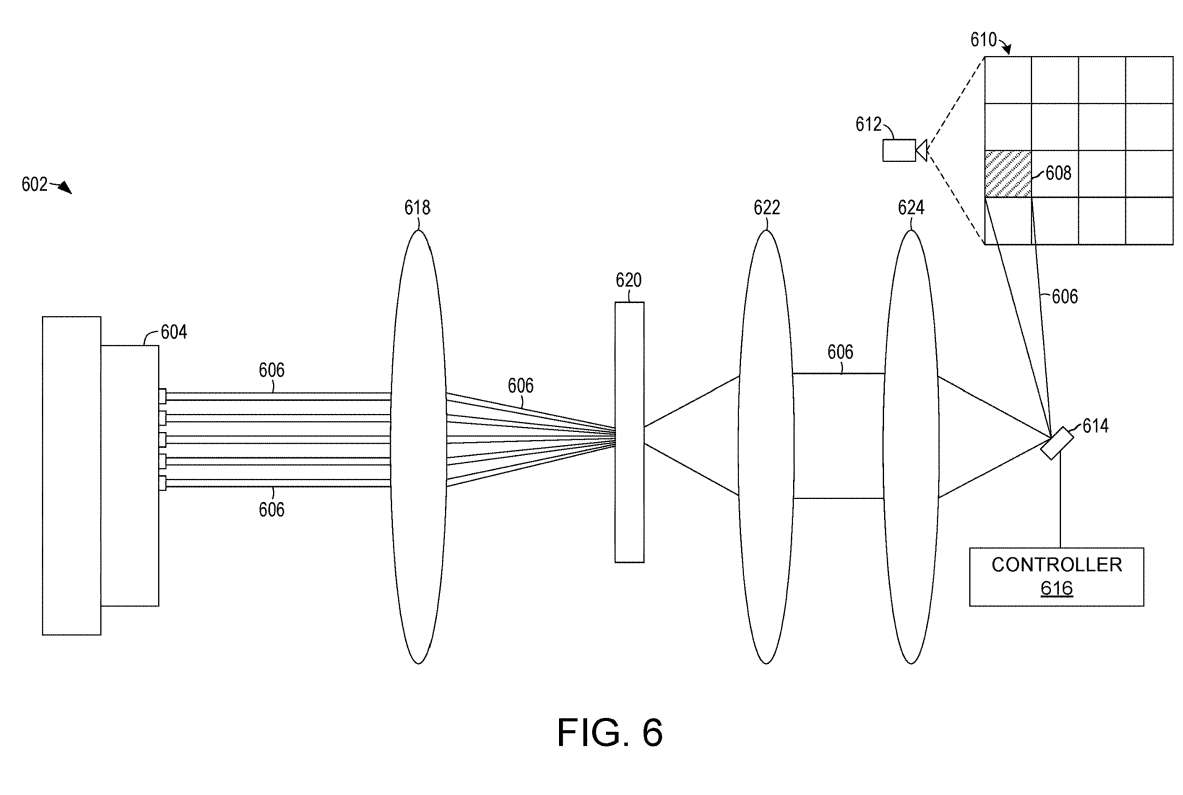
图6显示了ToF投影仪设备602的示例,设备602可以包括根据上面描述的的扫描镜装置。ToF投影装置602是图2中投影装置230的一个示例。ToF投影仪设备602包括光源604,诸如垂直腔面发射激光器(VCSEL)。
垂直腔面发射激光器包括多个激光腔,每个激光腔可操作地配置为发射光606。光源606照亮分区ToF摄像头612的视场610的部分608。ToF摄像头612对由光源606照射的部分608进行成像,以确定视场610的部分608的深度值。
ToF投影仪设备602同时包括扫描镜装置614,扫描镜装置614由控制器616控制,并用于将来自光源604的光606投射到环境中。扫描镜装置614可选地通过聚焦透镜618、扩散透镜620和/或中继透镜622、624接收光606。控制器616可以包括计算系统。
所述扫描镜装置614配置成将所述光606引导至所述摄像头612的视场610的部分608。扫描镜装置614进一步配置为以预定图案移动光源606以扫描视场610。
在一个实施例中,扫描镜装置614配置为以高达100- 1000hz的帧速率对视场610进行光栅扫描。在其他示例中,将扫描镜装置614配置为以大于1000hz或小于100hz的帧速率扫描视图610。通过成像所述视场610的每个照明部分608,所述摄像头612可以构建所述视场610的3D深度图像。
另外,使用ToF方法对视场610成像,可以使用相对低强度的光源604来构建深度图像,以照亮视场的一部分,而不是使用投影在视场的更大部分的高强度光源。这使得ToF投影仪设备602比其他ToF深度感测设备占用更少的空间和消耗更少的功率。
在一个实施例中,所述扫描镜装置614交替地配置为用作微波反射器。例如,扫描镜装置614可以将频率在0.1 GHz至1000 GHz范围内的微波以类似于光606的预定模式投射到环境中,而其可由摄像头612使用以获得环境的微波图像。
微波对天气条件和光照的弹性,以及它们穿过许多障碍物的能力,会导致比使用其他电磁波谱更可靠的ToF深度测绘和/或手势检测。
名为“Scanning mirror device”的微软专利申请最初在2022年6月提交,并在日前由美国专利商标局公布。
需要注意的是,一般来说,美国专利申请接收审查后,自申请日或优先权日起18个月自动公布或根据申请人要求在申请日起18个月内进行公开。注意,专利申请公开不代表专利获批。在专利申请后,美国专利商标局需要进行实际审查,时间可能在1年至3年不等。
另外,这只是一份专利申请,不代表一定通过,同时不确定是否会实际商用及实际的应用效果。