微软AR/VR专利提出无源控制器追踪方法
无源控制器
(映维网Nweon 2024年08月26日)当前用于追踪用户控制器的方法在计算成本方面可能非常昂贵,特别是当用户控制器包含与头显相应组件持续通信的有源追踪组件时。系统所需的处理负载可能会导致电池和其他电源的大量消耗,而这样的负载同时会导致系统组件过热和整体性能下降。
在日前公布的一份专利申请中,微软提出了一种用于用户控制器追踪的改进方法。具体来说,这是一种无源控制器追踪方法。
无源控制器系统的设计相对便宜(不需要有源追踪追踪组件),在操作范围方面可高度定制。另外,并且功率要求较低的。
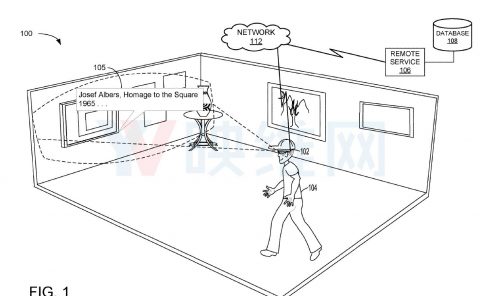
有益的是,在混合现实系统中,无源控制器系统可设计为手持遥控器,可在用户有源传感器系统的一臂长度内进行追踪,使得有源传感器系统能够以亚毫米和亚弧度精度追踪无源控制器系统的位置和方向。
另一个技术优势在于,无源控制器不一定需要有源传感器系统的视线,因为从无源控制器发送到有源传感器系统并从无源控制器反射到有源传感器系统的信号有时可以穿过会遮挡视线追踪所需的摄像头成像的材料。
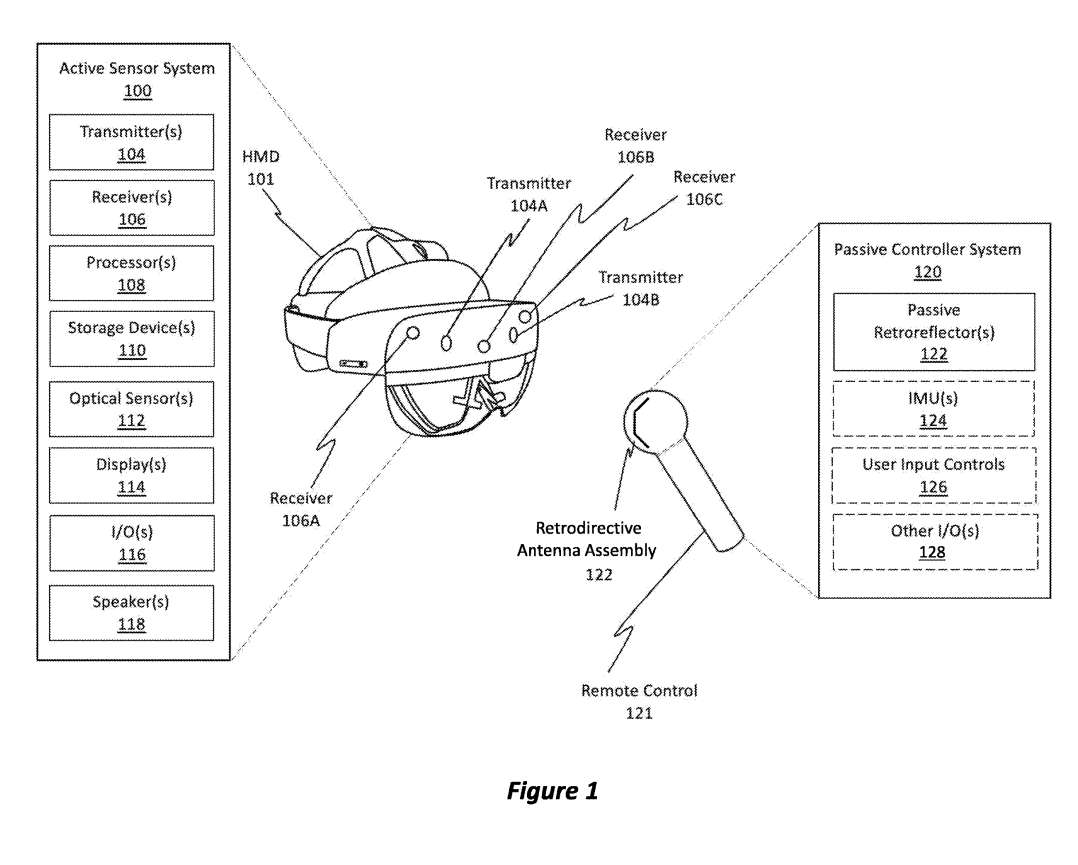
图1示出了有源传感器系统100和无源控制器系统120。在图1中描述为头戴式设备的有源传感器系统100包括多个发射器104和多个接收器106。
图1同时示出无源控制器系统120,其描述为遥控器121,并包括多反向表面安装天线组件122。
值得注意的是,多反向表面安装天线组件可称为“组件”或“反向组件”,它不需要有源组件来促进雷达反射和目标追踪。
在一个实施例中,无源控制器系统120任选地包括一个或多个惯性测量单元、用户输入控制器126和/或其他I/O 128。其他I/O包括触觉反馈、麦克风、扬声器、光学传感器、发光设备或其他输入/输出。
但需要注意的是,无源控制器系统120不需要包括任何IMU或其他供电追踪单元来追踪控制器相对于有源传感器系统100的方向和/或位置。事实上,在大多数优选配置中,无源控制器系统120不包括和/或不使用IMU 124来定位无源控制器系统相对于有源传感器系统100的定位。
相反,诸如IMU等组件仅仅是可选的,如果确定存在大量的无线电干扰,则可能干扰无源控制器追踪的信号传输。
在可选实施例中,系统可以基于分析在系统接收的传感器数据和/或基于用户输入或第三方输入动态检测干扰,并且可以响应地激活和/或使用来自IMU 124的IMU传感器数据来执行有源追踪。
控制器同时可以包括一个单独的电源(未示出),从而为无源追踪控制器中的任何供电组件供电。
在一个实施例中,无源控制器系统120包括一个或多个有源组件,以将无源控制器系统转换为有源控制器系统。例如,有源反向表面安装天线组件包括与放大器耦合的反向天线阵列,其放大反射信号并显着增加控制器系统提供的有效雷达横截面。
图2A-2B说明用于检测无源控制器系统220相对于定位在与无源控制器系统预定距离内的有源传感器系统200的方向和位置。
有源传感器系统200将一个或多个信号传输到无源控制器系统220,并且以这样的方式将一个或多个信号从无源控制器系统反射回有源传感器系统作为一个或多个反射信号214。
有源传感器系统200配置成在相对全向的信号传输区域中,以朝向有源传感器系统200的正面的方向性,从有源传感器系统200的多个单稳态发射器传输一个或多个信号。朝向位于所述有源传感器系统和信号传输区域的预定距离内的无源控制器系统220。
所述有源传感器系统200同时配置为接收和检测从附属于所述无源控制器系统220的反向定向天线组件222反射回来的一个或多个反射信号214。反向指示天线组件222配置在无源控制器系统220,以将一个或多个信号反射回有源传感器系统200,并作为一个或多个反射信号214。
在一个实施例中,当无源控制器系统位于信号传输区域内有源传感器系统的预定距离内时,无论无源控制器系统的方向或位置如何,信号都被反射。
有源传感器系统200的一个或多个接收器接收并检测一个或更多个反射信号214/。然后,有源传感器系统100能够基于信号传输区域内的一个或者更多个原始信号和一个或者多个反射信号214来计算/确定无源控制器系统220相对于有源传感器系统的方向和位置。
如图2A所示,通过发射器202A和202B传输的一个或多个信号在信号传输区210A和/或信号传输区210B内传输。如图2A所示,信号传输区210A和信号传输区210B为独立的离散信号传输区。
在一个实施例中,信号传输区210A和信号传输区210B至少部分和/或完全重叠。在其他实施例中,信号传输区域210A和信号传输区域210B不重叠。
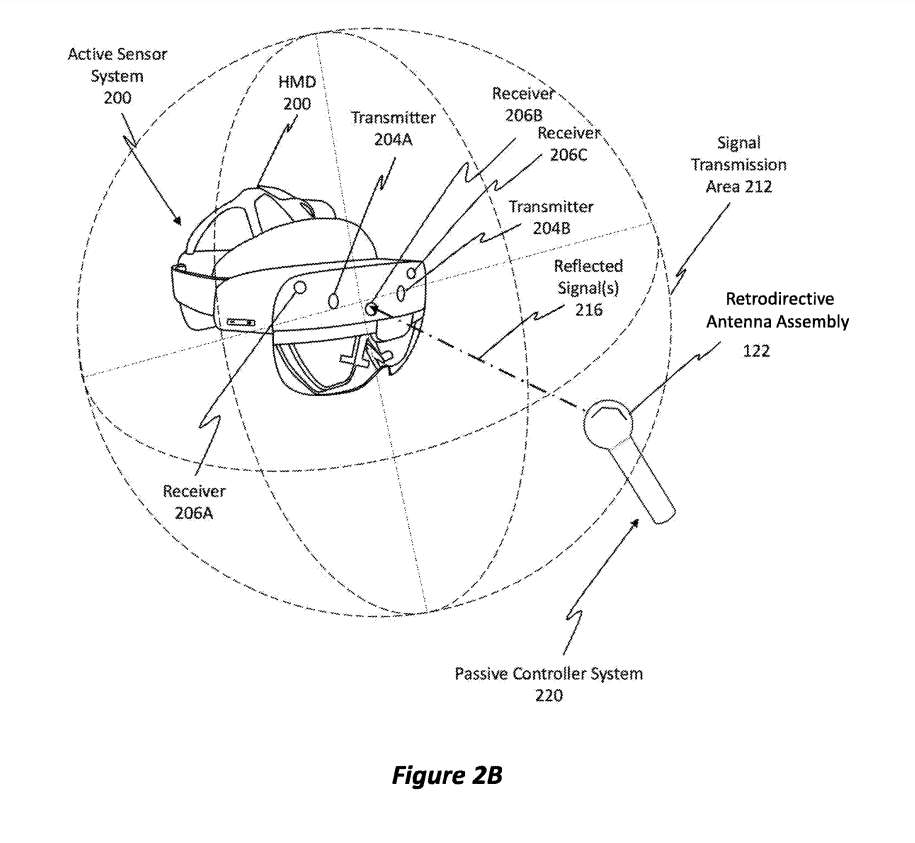
如图2B所示,有源传感器系统200包括多个发射器,当无源控制器系统220位于相对于有源传感器系统200的特定距离内时,其配置为在连续信号传输区域212内传输一个或多个信号。无源控制器系统220的组件222配置成将信号传输区域212内的一个或多个信号作为一个或多个反射信号216反射回有源传感器系统200的多个接收器。
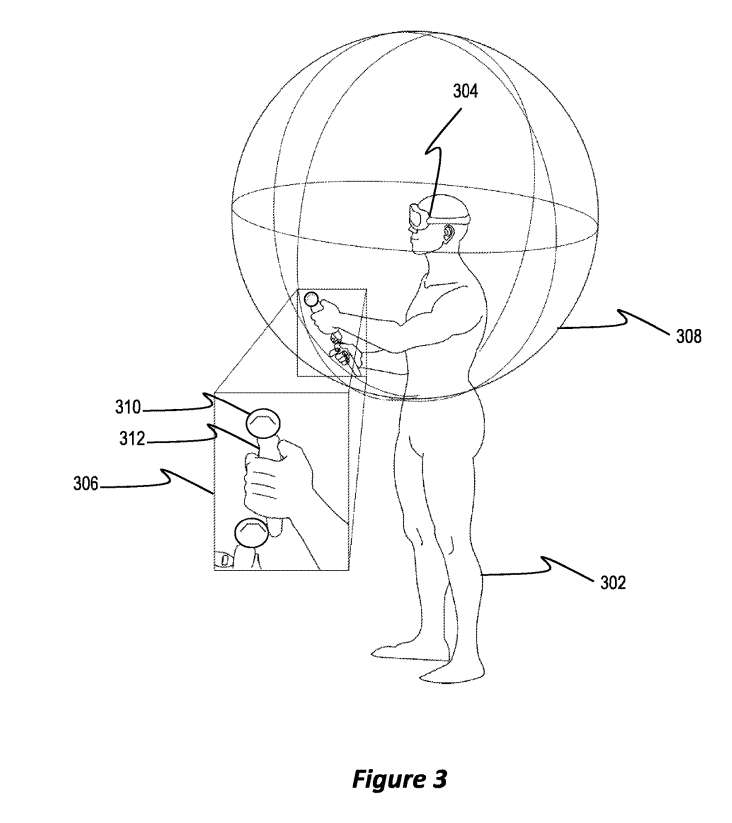
图3示出用于在有源传感器系统304的预定距离308内使用有源传感器系统304追踪无源控制器系统306。
无源控制器系统306包括主体312A,主体312A配置为在用户302的手中持有,并且与用户的手一起以六自由度移动。在这方面,所述无源控制器系统306可视为六自由度控制器。
无源控制器系统306同时包括至少一个多反向表面安装天线组件310,天线组件310以提供反射表面的配置连接到主体312,当无源控制器系统位于距离雷达信号源小于或等于预定最大距离的范围内时,反射表面用于反射雷达信号。
反向表面安装天线组件提供至少180度的反射面。在一个实施例中,无源控制器系统位于距离雷达信号源的预定距离308内,其方向相对于雷达信号源在360度球形范围内。
在所述有源传感器系统304和所述无源控制器系统306之间的预定距离308在约0.01米至约4米的范围内。但在备选实施例中,预定距离308的范围可以延伸到4米以上和/或小于0.01米。
由有源系统产生和传输的信号如图5所示。可根据无源控制器系统的大小和/或无源控制器系统与有源传感器系统之间的预定距离进行调节。例如,信号的范围大约在60 GHz到100 GHz之间,或者更广泛地说,在24 GHz到110 GHz之间。特别是,60 GHz是一个合适的无线电频率,因为它可以在很短的范围内保持信号功率。
增加无线电频率允许反向指示组件比传统的雷达反射器更小。所述频率和各自的反向阵列尺寸允许有源传感器系统获得亚毫米和亚弧度的无源控制器系统追踪精度。
在一个实施例中,组件222的每个反向定向天线阵列调谐到不同的频率,以增加可以保持充足信号功率的范围频率。
通过调整天线的调谐频率和/或有源传感器收发器的传输频率,可以增加无源控制器系统与有源传感器系统之间预定的操作距离,特别是如果将组件222以远离用户手臂和手的长度放置在无源控制器系统。
在一个实施例中,无源控制器系统配置为拉长的遥控器,如光剑,当组件放置在远离用户手的拉长遥控器的远端时,信号反射视线内的干扰/中断就会减少,用户触摸或短路部分反向指令组件的可能性会降低。
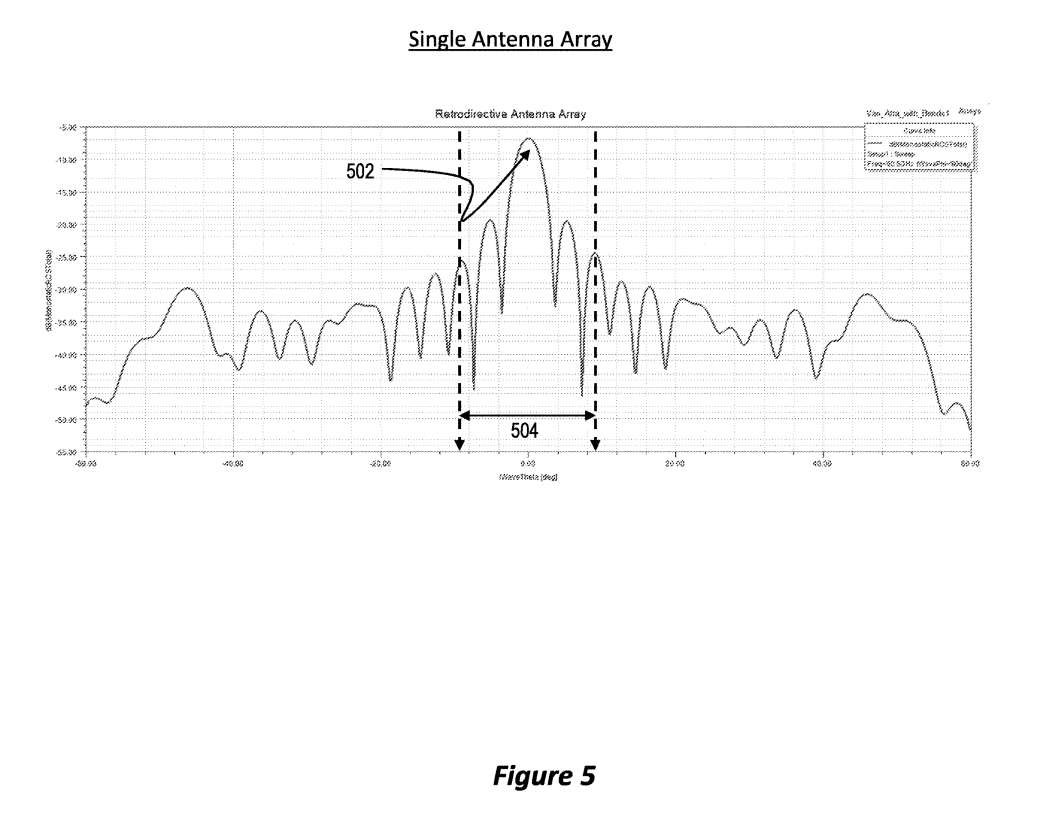
图4示出了传统的天线阵列。如图4所示,天线阵列400包括平面矩形形状。天线阵列400同时包括针对特定频率调谐的多个天线单元单元。传统的天线阵列在入射电磁波与天线表面法线成一定角度时,反射率较差。另外,雷达横截面受限于单平面。这可以在图5中看到,图5显示了传统反向定向天线阵列的信号响应示例图。
如图5所示,只有一个幅值峰值502,其带宽504很窄,即便考虑到相邻的幅值远低于幅值峰值的幅值。
图6A-6B说明了一种新型反向指示天线组件。图6A显示了多反向表面安装天线组件600的透视图,其中包括多个反向天线阵列,例如阵列602、阵列604、阵列606。每个反向定向天线阵列安装在表面之上,使得每个反向定向天线阵列与至少一个其他反向定向天线阵列以一定角度偏移。组件600配置成将从雷达信号源接收到的雷达信号反射到雷达信号接收器。
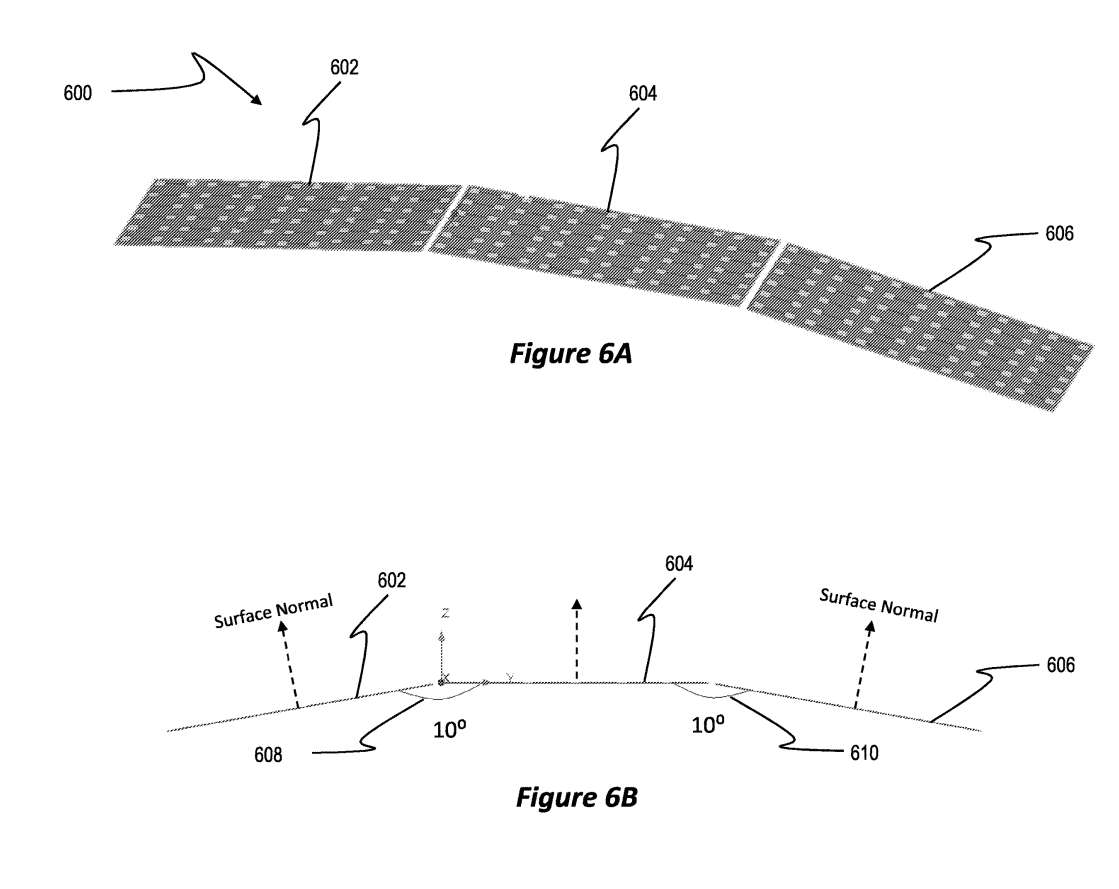
如图6A所示,每个反向天线阵列包括具有两个伸长边缘和两个远端边缘的矩形形状。多个反向定向天线阵列线性对齐,每个反向定向天线阵列的远端边缘相邻。在一个实例中,阵列对齐成每个阵列的延长边相邻。
如图6B所示,多个反向定向天线阵列包括第一反向定向天线阵列(阵列602),包括第一远端边缘和第二远端边缘,第二反向定向天线阵列(阵列604)以水平方向上偏移的第一角度608连接到第一反向定向天线阵列的第一远端边缘;以及第三反向定向天线阵列(阵列606),以在水平方向上的第二角度610偏移连接到第一反向定向天线阵列的第二远端边缘。
如图6B所示,第一角608和第二角610包含相等的角(例如10度)。或者,第一角608和第二角包括不同的偏置角,例如介于5-10度之间的角或小于10度的另一个角、10-20度或大于10度的另一个角。
组件600的每个反向定向天线阵列可调谐到一个或多个频率。因此,每个阵列调谐到相同的频率,而在其他实例中,至少一个反向定向天线阵列调谐到与另一个反向定向天线阵列不同的频率。
在不同入射角下获得良好的雷达频率反射有利于提高雷达的探测能力。因此,通过有多个反向天线阵列,并且它们各自的表面法线之间有一个夹角,在入射角处总反射功率增加。这反过来又改善了组件提供的雷达横截面。
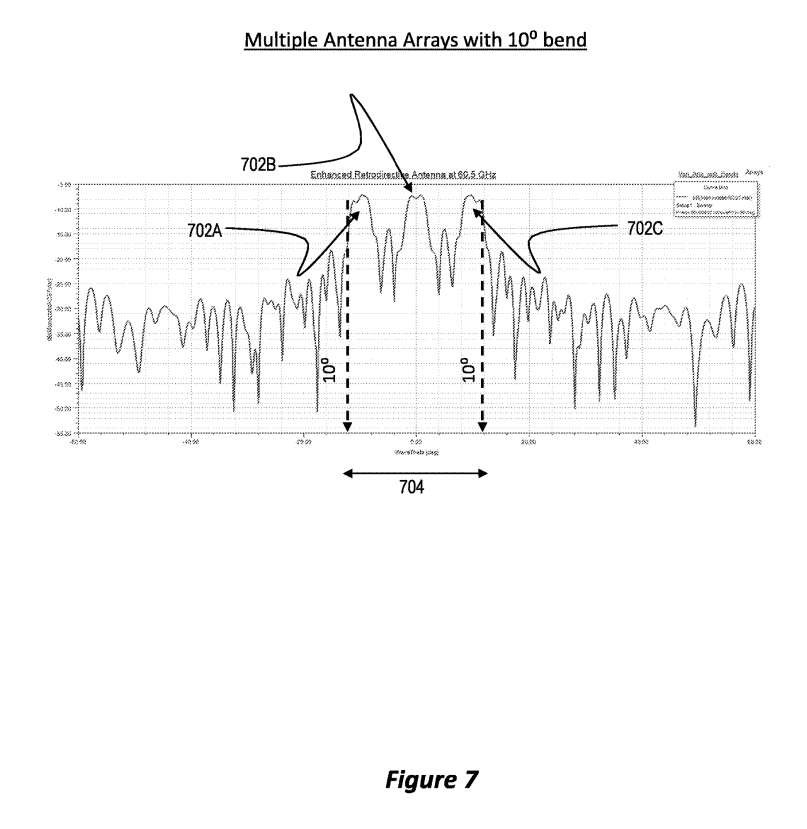
这种改进的反射功率可以在图7中看到,图7展示了新型反向定向天线组件的信号响应示例图。现在可以看到多个相邻的高振幅峰,如振幅峰702A、振幅峰702B、振幅峰702C。与图5的带宽504相比,这显着增加了带宽704。这一改进是通过多个反向天线阵列彼此以一定角度偏移来实现。
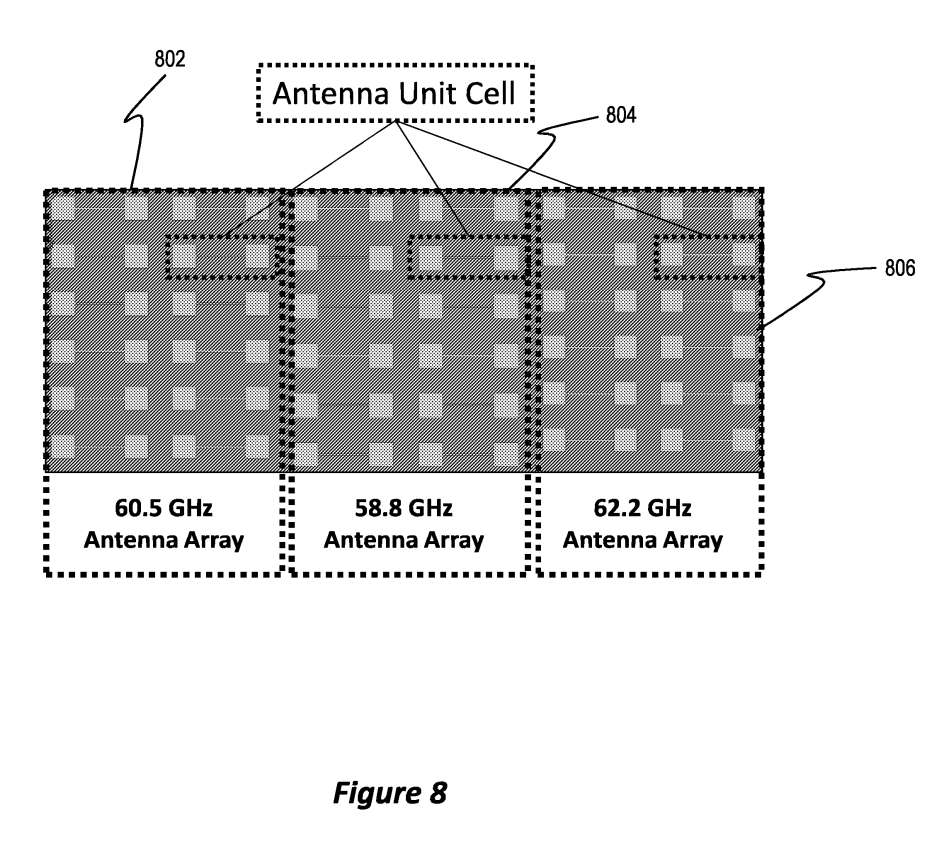
图8说明了新型反向定向天线组件的示例配置和频率调谐。例如,将第一天线阵列802调谐到60.5 GHZ,将第二天线阵列804调谐到58.8 GHZ,将第三天线阵列806调谐到62.2 GHZ。每个天线阵列包括多个天线单元单元。
天线阵列组件和组件中的每个天线阵列的总体尺寸尺寸可以变化以适应不同的需要和偏好,并且可以由每个阵列上的天线单元单元的数量决定。如图所示,天线阵列组件中的每个天线阵列可以具有相似的宽度和长度。在其他实施例中,天线阵列组件包括具有不同相应宽度和/或长度的不同天线阵列,例如以在不同相应天线阵列上容纳不同数量的天线单元单元。
通过配置具有不同天线阵列的反向定向天线组件,每个天线阵列都调谐到不同的频率。这有利于提高传输速度。这对对象追踪是有益的,特别是在VR和AR的情况下。
相关专利:Microsoft Patent | Multiple retrodirective surface mount antenna assembly
名为“Multiple retrodirective surface mount antenna assembly”的微软专利申请最初在2023年2月提交,并在日前由美国专利商标局公布。