微软为AR/VR触觉反馈控制器申请专利,为AR/VR交互提供感知体验
控制器
(映维网Nweon 2022年04月22日)人类主要是通过五种感官来感知世界,而虚拟现实体验大多是由视觉引导,所以在虚拟环境中进行交互有时会出现感知差距。针对这种情况,社区正在研究一系列旨在提供触觉反馈的解决方案。日前,美国专利商标局公布了一份名为“Haptic controller(触觉反馈控制器)”的微软专利申请。
具体来说,专利介绍的触觉控制器可以包括可旋转地固定到基座的第一和第二绞盘,以及连接在第一和第二绞盘之间的能量存储机制。触觉控制器同时可以包括固定在第一绞盘的用户接合组件,以及配置成通过控制第一和第二绞盘所经历的旋转摩擦来控制施加到用户接合组件的旋转力的控制组件。
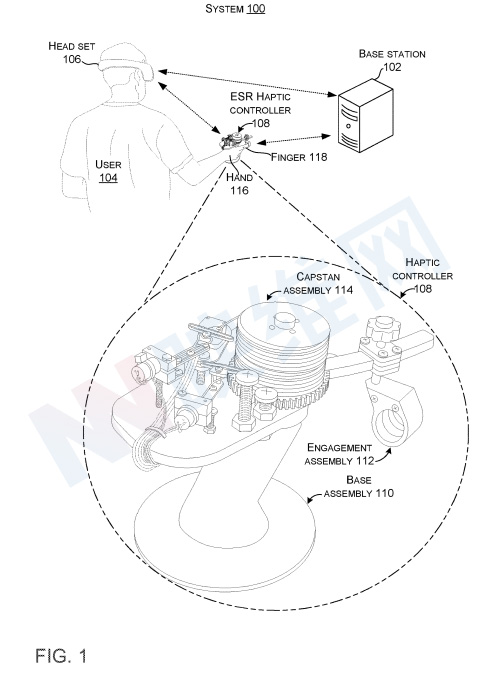
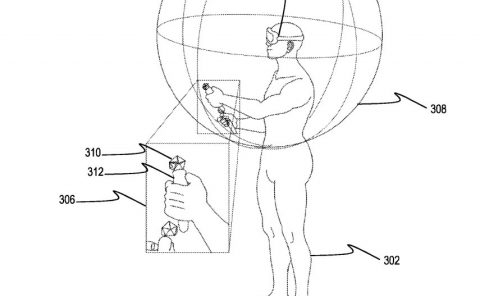
如图1所示,虚拟现实系统100可以包括储能抗阻(Energy-Storing Resistive;ESR)触觉控制器108。ESR触觉控制器108可包括基座组件110、接合组件112和/或绞盘组件114。ESR触觉控制器108可以是手持式设备,并与头显106和/或基站102协同工作,从而为用户创建逼真的沉浸式体验。例如,头显106可以向用户展示握持弹性球的画面,而ESR触觉控制器108则可以模拟用户挤压弹性球的感觉。
ESR触觉控制器108可直接和/或间接感应手指运动和/或力,并向手指118施加力,从而模拟操作虚拟对象的感觉。
大多数直接向肢体施加力的传统触觉控制器都属于机电主动式,亦即通过施加的电信号主动产生力或扭矩。它们将电能直接转化为所需的力或扭矩,而这需要相当大的电力来产生力。另外,主动致动器大多是由小型电机组成,存在驱动速度慢、电量需求大、设备易碎等问题。
相比之下,微软表示自己构思的触觉控制器可以使用电阻致动器来抗阻外部机械运动(人类输入)。这种电阻式执行器能够以更大的阻力提供对人体肢体运动的触觉响应,同时消耗更少的电力,比传统的伺服加齿轮箱解决方案运行更快,和/或不会因用户在电阻致动器施加过大的力而受损。另外,传统的电阻触觉设备不能提供任何能量存储,而微软构思的ESR触觉控制器可以为用户运动提供电阻制动和来自用户运动的能量存储。
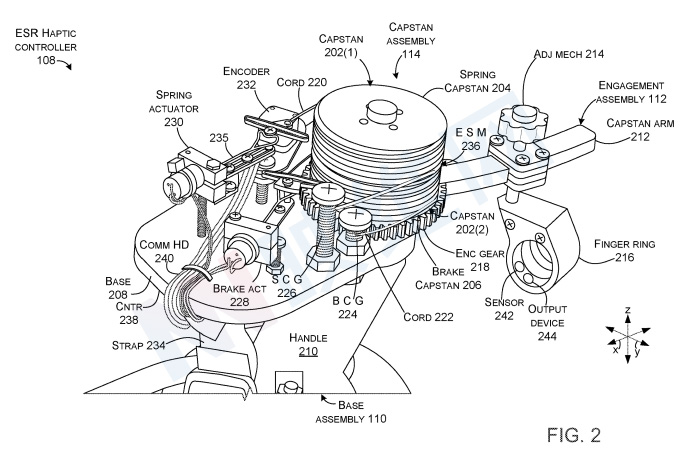
图2显示了ESR触觉控制器108,其可包括第一和第二绞盘202。第一绞盘202可以用作弹簧绞盘204,第二绞盘202可以用作制动绞盘206。触觉控制器108同时可以包括底座208、手柄210、绞盘臂212、手指长度调节机制214、指环216、编码器齿轮218、弹簧绞盘线缆220、制动绞盘线缆222、制动线接地224、弹簧线接地226、制动执行器228、弹簧执行器230、编码器232和/或手带234等元件。其中,制动执行器228和弹簧执行器230显示为扭线作动器235。
ESR触觉控制器108同时可以包括储能机制236、控制组件238和/或通信组件240。能量存储机制236可以连接在第一和第二绞盘202之间。啮合组件112可以包括传感器242和/或输出装置244。
这两个传感器都位于指环216之上,并且可以通信地耦合到控制器238。传感器可以包括任何加速度计、陀螺仪、摄像头、麦克风和/或压力传感器等。ESR触觉控制器108同时可以包括其他传感器,例如六轴传感器。
微软描述的配置主要利用第一和第二绞盘来提供与单个手指有关的手指运动阻力,但控制器可以添加额外的绞盘202,从而为额外的手指和/或拇指提供阻力。
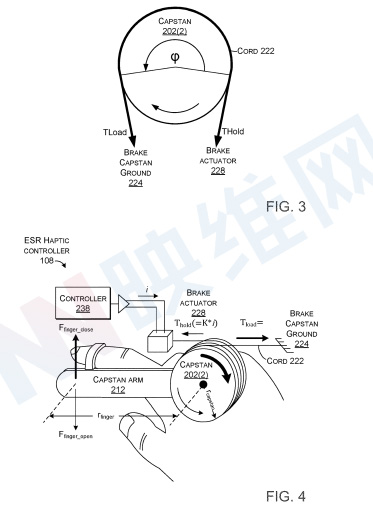
图3显示了绞盘202、线缆222、制动绞盘接地224和制动执行器228之间的关系。绞盘202可以用作制动绞盘。制动绞盘可以利用缠绕有绳索的绞盘的对数力关系。在这种力关系中,绞盘摩擦力取决于固定的总风向角以及固定的绳索和绞盘滚筒之间的相互摩擦系数。在这种实施例中,制动绞盘接地224可以提供更高的张力,制动执行器228可以提供较低的张力。
图4显示了ESR触觉控制器的制动绞盘方面和力方程。与大多数绞盘系统不同,在ESR触觉控制器实现中,绞盘由用户的手指旋转。制动执行器228可在线缆施加低张力,线缆的高张力侧通过制动绞盘接地224固定至ESR触觉控制器108。
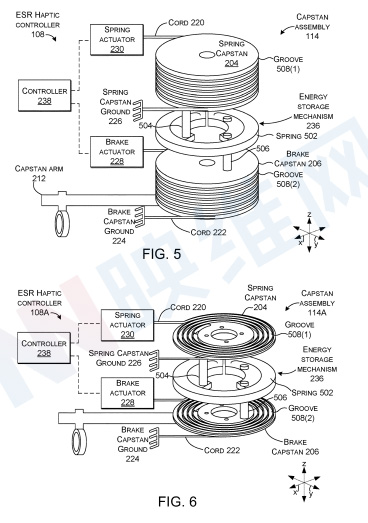
图5显示了绞盘组件114的分解图。储能机制236位于弹簧绞盘204和制动绞盘206之间。在所述示例中,储能机制236表现为弹簧502,例如扭转弹簧。弹簧502的一端连接到弹簧绞盘204,弹簧502的另一端连接到制动绞盘206。
弹簧绞盘204和制动绞盘206沿平行于z基准轴的公共旋转轴垂直堆叠。另外,弹簧绞盘204和制动绞盘206具有相同的直径。弹簧绞盘204和制动绞盘206在垂直方向高度拉长,并在其中形成凹槽508。凹槽508的直径大约等于线缆220和222的直径。
线缆220可以缠绕在从弹簧绞盘接地226到弹簧执行器230的凹槽508周围。类似地,线缆222可以缠绕在从制动绞盘接地224到制动执行器228的凹槽508周围。凹槽508减少和/或消除绳索缠绕在其顶部的可能性,以防绞盘无法操作。
弹簧绞盘204或制动绞盘206中的任何一个相对于弹簧绞盘204和制动绞盘206中的另一个的旋转都可以在弹簧502上施加力。所述力可以存储在弹簧502中,然后释放。例如,用户可在绞盘臂212施加力以旋转绞盘臂,例如夹紧或挤压运动。
制动执行器可以设置制动绞盘的旋转阻力。绞盘臂212可以固定在制动绞盘206。旋转绞盘臂212可以在弹簧绞盘204保持静止或由弹簧执行器的张力控制旋转较少的情况下旋转制动绞盘206。这可以在弹簧502施加力,并导致来自用户的能量存储在弹簧中。所述存储的能量可在绞盘臂212产生相反的旋转力,以模拟挤压弹性物体,例如泡沫球。
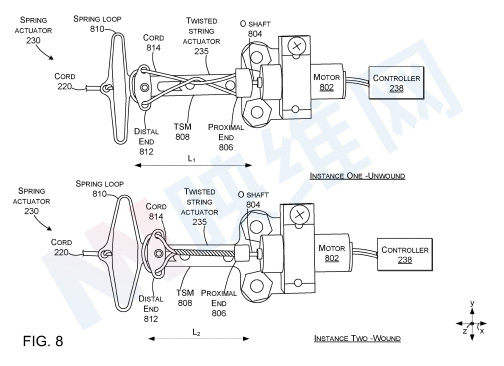
图8显示了弹簧致动器230的细节,其表现为扭线致动器235。控制组件238电耦合到马达802。马达802的输出轴804连接到扭绳机制808的近端806。扭弦机制可以用作旋转固定但滑动的臂。线缆220连接到弹簧圈810。弹簧环810在线缆和扭绳机制808的远端812之间延伸。
线缆814可以从扭线机制808的近端806延伸,绕远端812循环并返回近端806。在缠绕状态下,可以通过在同一方向上进一步旋转输出轴,或通过在相反方向上旋转输出轴,轻松调整线缆220上的张力。
微软指出,扭线致动器(TSA)235可以提供将电能转换为机械能的效率,以及其后驱动能力。另外,由于其能量转换效率加上低惯性负载和无芯电机设计,其响应和延迟可能比其他价格合理的选项快得多。TSA产生的噪点往往比带齿轮的执行机制的噪点小,而且扭转弹簧致动器可提供相对快速的响应时间,以避免用户可检测到的滞后。同时,绞盘组件不依赖于来自控制器的高张力,因此可以利用TSA的有利方面,同时最小化任何潜在的不利方面。
名为“Haptic controller(触觉反馈控制器)”的微软专利申请最初在2021年12月提交,并在日前由美国专利商标局公布。