微软AR/VR专利提出改进MEMS扫描镜组件中的引线键合公共电气连接
MEMS扫描镜组件中的引线键合公共电气连接
(映维网Nweon 2023年07月28日)在传统的压电MEMS扫描镜系统中,金属致动器框架(与引线键合不兼容)用作所有压电元件(即致动器)的公共电连接。由于基板用作器件的电气和机械互连,因此还必须在金属致动器框架和基板之间进行电气连接。
在以前的器件中,导电粘合剂通常用于将致动器框架机械地和电气地连接到基板。然而,导电粘合剂的机械强度不如专门用于结构目的的粘合剂。机械强度的降低给设备带来了可靠性问题。
为了防止可靠性问题,将导电粘合剂和结构粘合剂混合,例如10%的导电粘合剂和90%的结构粘合剂。然而,粘合剂在整个粘合过程中混合不均匀,导致机械强度和导电性能发生变化。例如,导电粘合剂可能被结构粘合剂覆盖,并且发生导电问题。类似地,结构粘合剂可以在发生结构粘合的地方被覆盖或稀释,并且可能发生结构问题。
最终,设备的每一次迭代都遇到了效率问题。随着效率的降低,设备停止正常工作。
在名为“Wire bonded common electrical connection in a piezoelectric micro-electro-mechanical system scanning mirror assembly”的专利申请中,微软介绍了一种改进的方法。
在一个实施例中,在压电MEMS扫描镜系统的致动器框架和与结构粘合剂分离的基板之间建立电连接,从而在致动器框架和基板之间建立机械键合。最初,使用结构键合(没有导电性能)将致动器框架连接到基板上。在完全形成键合之后,可以通过两种方式中的一种来创建单独的电连接。
在一个方面,致动器框架可以涂覆有涂层,涂层使得致动器框架的表面能够引线键合。然后可以在致动器框架和基板之间形成引线键合。
在另一个方面,导电材料的迹线沉积在致动器框架和基板之间的机械键合的外边缘上,并且可以在导电迹线上施加最终保护层,以保护迹线免受机械或环境损坏。导线键合和导电材料的迹线都可以在一个器件中用于冗余。
类似地,可以在一个器件中使用多于一个的引线键合或多于一个导电材料迹线以实现冗余。其结果是系统具有最大的机械性能,并且比以前的设备提高了效率。
所以,发明主要描述了扫描镜系统中的引线键合公共电连接。所述系统包括致动器框架,致动器框架由涂覆有涂层的框架材料组成,涂层使得致动器框架的表面能够引线键合。系统同时包括至少一个致动器,其具有在致动器的顶表面上的顶部电极和在致动器的底表面上的底部电极。至少一个致动器可以用部分导电的粘合剂附接到致动器框架的顶表面。
所述系统同时包括反射镜,反射镜延伸穿过致动器框架的中央安装构件中的间隙。反射镜的锚定部分用结构粘合剂连接到致动器框架的顶表面。系统进一步包括用结构粘合剂连接到致动器框架的底表面的基板。基板上的电焊盘使得至少一个致动器的顶表面上的顶电极和基板、反射镜和基板以及致动器框架的顶表面与基板之间能够电连接。
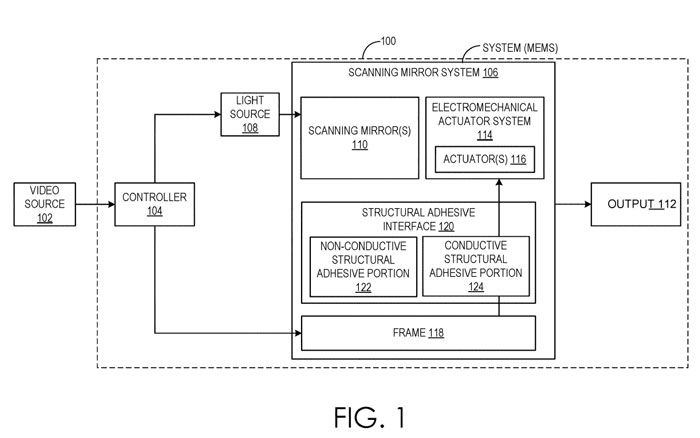
图1示示出了与视频源102通信的示例显示设备100。扫描镜系统106包括一个或多个扫描镜110,扫描镜110可控制以改变来自光源的光反射的角度,从而扫描图像。
扫描镜系统106包括机电致动器系统114,机电致动器系统包括致动器116以实现扫描镜110的移动。可以使用各种类型的致动器来控制MEMS反射镜系统。
如图1所示,扫描镜110和机电致动器系统114中的一个或多个通过结构粘合剂界面120键合到致动器框架118。在一个示例中,结构粘合剂界面120包括非导电结构粘合剂部分122和导电结构粘合剂部124两者,其布置为使得非导电结构粘合部122至少部分地围绕并包围导电结构粘合部分124。
控制器104可以配置为经由通过致动器框架118和导电结构粘合剂部分124传导到致动器116的电来驱动机电致动器系统114的致动器116。
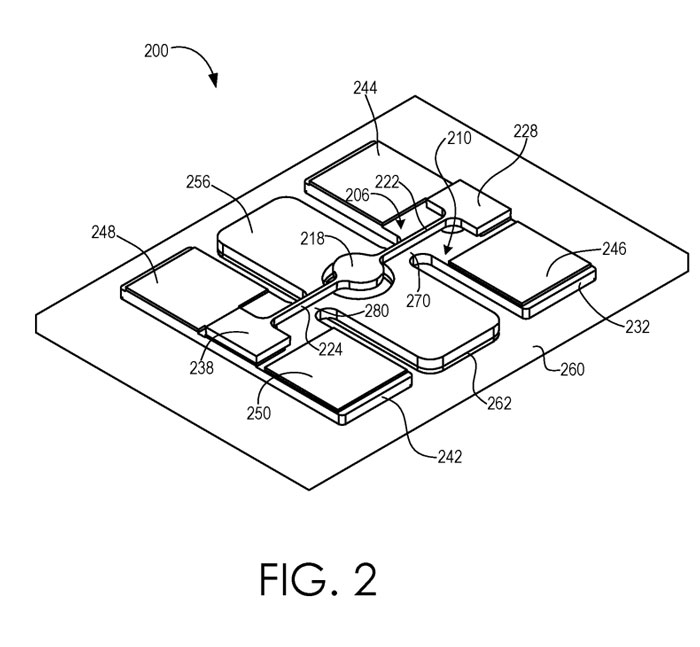
图2-4示出了包括扫描镜组件206的扫描镜系统200的具体示例,扫描镜组件包括致动器框架210的示例。扫描镜组件206包括MEMS镜218,MEMS镜218经由第一弯曲部222和第二弯曲部224附接到致动器框架210。第一弯曲部222和第二弯曲部224可以提供相应的枢轴,反射镜218可以通过枢轴旋转,从而改变其角度取向以改变来自光源的光被反射的角度。反射镜218可以在水平或垂直方向上扫描,这取决于扫描反射镜系统200被键合到显示设备中的方位。
扫描镜组件206的第一弯曲部222连接到第一锚固部分228。第一锚固部分通过结构粘合剂界面固定到致动器框架210的第一可移动构件232。以类似的方式,扫描镜组件206的第二弯曲部224连接到第二锚定部分238,第二锚固件部分238通过结构粘合剂界面固定到致动器框架210的第二可移动构件242。
在示例中,扫描镜系统200包括机电致动器系统,机电致动器系统包括邻近第一弯曲部222固定到第一可移动构件232的第一致动器对和邻近第二弯曲部224固定到第二可移动构件242的第二致动器对。第一致动器对包括第一致动器244和第二致动器246,第二致动器对包括第三致动器248和第四致动器250。
致动器可以在反射镜218中引起期望的振荡。例如,在接收到具有第一极性(例如正)的电信号时,致动器244和248可以分别向位于致动器下方的可移动构件232和242的部分施加收缩力。
另一方面,具有第二不同极性(例如负)的电信号可以致使致动器244和248向可移动构件的相应底层部分施加扩张力,并且可以使致动器246和250向可移动部件232和242的相应底层施加收缩力。由致动器244、246、248和250施加的力的大小可以通过控制施加到致动器的电信号的大小来控制。
如上所述,施加到致动器的电信号可以通过将每个致动器键合到可移动构件232和242的相应底层部分的结构粘合剂界面120的导电结构粘合剂部分124传导。以这种方式,电信号可以施加到致动器框架210的导电材料,并且经由导电结构粘合剂部分124传导到致动器244、246、248和250中的每一个。
在其他示例中,扫描镜系统200的机电致动器系统可以使用任何合适类型的致动器。例如,每个致动器可以包括磁性致动器,其中磁性元件之间的磁力可以通过电信号改变。
在其他示例中,每个致动器可以包括静电致动器,其中电极之间的电场可以变化以调节收缩力或扩张力。作为进一步的例子,每个机电致动器可以利用一个或多个双金属带,其中可以利用不同材料的不同热膨胀系数来改变施加的力。
在示例中,致动器框架210的中央安装构件256经由间隔件262固定到下面的基板260。中央安装构件256可以键合到间隔件262,并且间隔件通过结构粘合剂界面120键合到基板260,使得电信号可以从基板260传导到致动器244、246、248和250。
在图2-4的示例中,间隔件262将致动器框架210提升到基板260上方,从而使得可移动构件232和242能够移动。
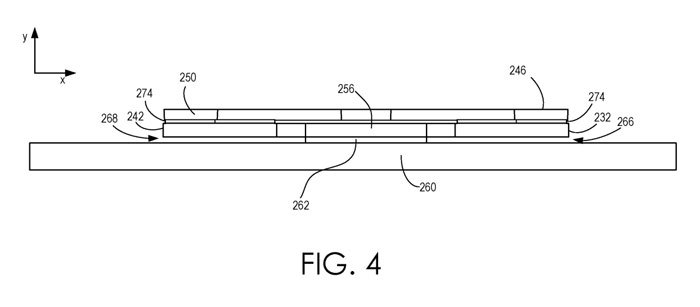
如图4所示,间隔件262分别在可移动构件232和242与下面的基板260之间产生间隙266和268。以这种方式,第一可移动构件232和第二可移动构件242漂浮在基板260上方,从而可以经由弯曲部222和224引起反射镜218的移动。
在一个示例中,间隙266和268中的每一个可以为大约0.4mm至0.6mm,以使得第一可移动构件232和第二可移动构件242能够相对于基板260沿y轴移动。在其他示例中,可以利用任何其他合适的间隙距离来适应不同的扫描镜系统配置和期望的镜移动。
在所述示例中,间隔件262具有与致动器框架210的安装构件256基本相同的形状。在其他示例中,间隔件262可以具有与安装构件256不同的形状。如图3所示,致动器244、246、248和250通过部分导电粘合剂274键合到致动器框架210的可移动构件232和242的相应底层部分。
如图3所示,致动器框架210包括第一铰链270,第一铰链270将安装构件256的中心部分272与第一可移动构件232的中心部分276连接。第一铰链270位于与第一可移动构件232的相对端234和236基本等距的位置。
类似地,第一可移动构件232的中心部分276基本上位于第一可移动部件的相对端234和236之间的中间。
以类似的方式,致动器框架210包括第二铰链280,第二铰链将安装构件256的中心部分272与第二可移动构件242的中心部分282连接。与第一铰链270一样,第二铰链280位于与第二可移动构件242的相对端278和286基本等距的位置。第二可移动构件242的中心部分282也基本上位于第二可运动构件的相对端278和286之间的中间。
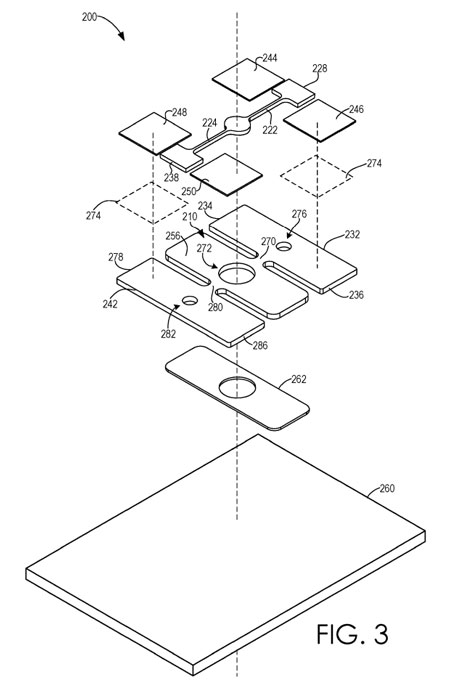
如图3所示,致动器244、246、248和250中的每一个可以通过部分导电粘合剂274键合到致动器框架210的可移动构件232和242的相应底层部分。在一个示例中,连接到反射镜218的锚定部分228和238也可以通过结构粘合剂键合到可移动构件232和242的下层部分。
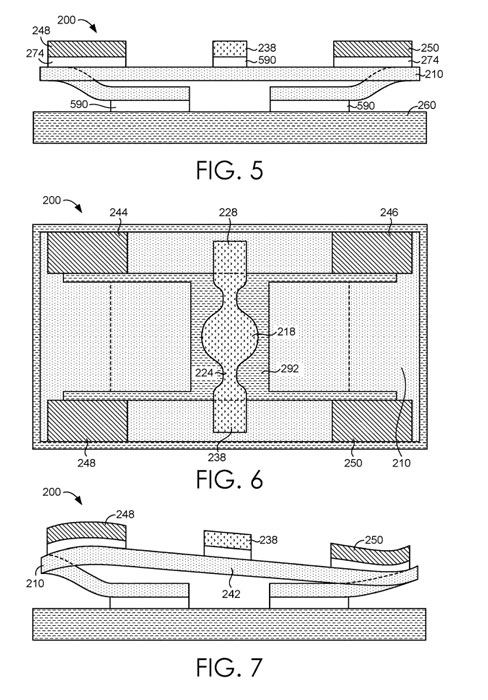
图5示出了扫描镜系统200的侧视图。如图所示,致动器框架210的底表面通过结构粘合剂附接到基板260。重要的是,结构粘合剂不具有导电性能,这使得能够获得致动器框架210和基板260之间的键合的最大机械性能。
在扫描镜系统200中,电连接和布线发生在基板260中。致动器的顶部电极引线键合到基板260上的电焊盘。在各方面中,四个引线键合使得能够在四个致动器中的每一个的顶表面与基板260之间进行电连接。
反射镜延伸穿过致动器框架210的中央安装构件中的间隙(图1中未示出)。反射镜的锚定部分228、238利用结构粘合剂590附接到致动器框架210的顶表面。反射镜被引线键合(未示出)到基板260上的电焊盘(未显示)。四线键合使得能够在反射镜和基板260之间进行电连接。
图6是扫描镜系统200的一个侧视图。如图所示,扫描镜系统200包括四个致动器244、246、248、250。
如上所述,致动器244、246、248、250中的每一个在顶表面上具有顶电极,在底表面上具有底电极,并且利用部分导电粘合剂(图2中未示出)附接到致动器框架210的顶表面。致动器244、246、248、250中的每一个的顶部电极被引线键合(未示出)到基板260上的电焊盘(未示示出)。引线键合能够实现致动器244、246、248、250中的每一个的顶表面与基板260之间的电连接。
反射镜218延伸穿过致动器框架210的中间的孔292。反射镜218的锚定部分228、238用结构粘合剂(图2中未示出)附接到致动器框架210的顶表面,并且通过第一弯曲部和第二弯曲部224连接到反射镜218。反射镜同时引线键合(未示出)到基板260上的电焊盘(未示出来)。四线键合使得能够在反射镜和基板260之间进行电连接。
图7示出了扫描镜系统200的一个侧视图。当在Z方向上在致动器248、250上施加电场时,致动器248、25试图在X和Y方向上收缩或膨胀。由于致动器248250受到致动器框架210的约束,因此致动器248250弯曲。
在致动器框架210一侧上的致动器试图收缩,并且致动器框架210另一侧上的制动器试图膨胀的情况下,致动器248、250在相反方向上弯曲,导致致动器框架210的第二可移动构件242轻微倾斜。
由于反射镜218的锚固部分238附接到第二可移动构件242,锚固部分238的倾斜导致反射镜218经由弯曲部(图7中未示出)以高得多的程度移动。
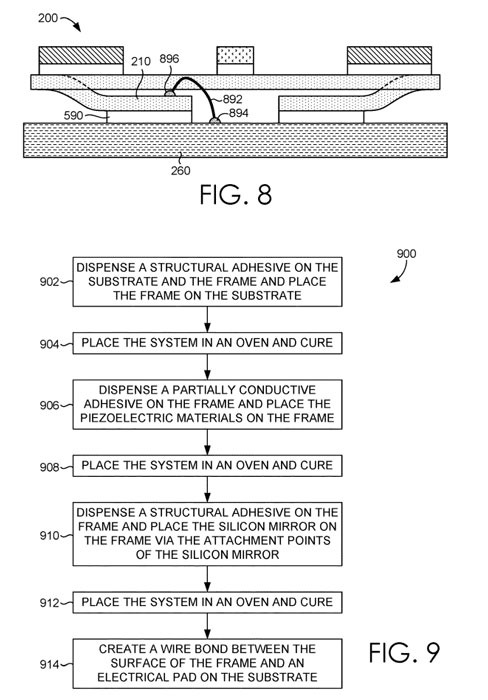
图8示出了扫描镜系统200中的示例性引线键合公共电连接侧视图。如图所示,扫描镜系统200包括在基板260上的公共迹线894与致动器框架896的表面之间的引线键合892。
如图所示,致动器框架210的底表面通过纯结构粘合剂590附接到基板260。结构粘合剂590不具有导电性能,这使得能够获得致动器框架210和基板260之间的键合的最大机械性能。
致动器框架210涂覆有涂层(例如无电镍浸金涂层或无电镍无电钯浸金涂层)。涂层使得致动器框架896的表面能够与引线键合兼容,。施加在致动器框架896的表面处的引线键合892完成致动器框架210和基板260之间的电连接。
在一个方面,引线键合892是金线,并且致动器框架896的表面上的涂层和基板260上的电焊盘894上的迹线包括金表面光洁度。在一个方面,为了冗余,可以在不同的位置应用多个引线键合。
图9示出了在扫描镜系统中提供引线键合公共电连接的方法900。
在步骤902,将结构粘合剂分配在基板上,并且将致动器框架(其已经涂覆有与引线键合兼容的涂层)放置在基板上。
在步骤904,将该系统放置在烘箱中并进行固化。
在步骤906,将部分导电粘合剂分配到致动器框架上,并且将致动器放置在致动器框架上。在步骤908,将该系统放置在烘箱中并进行固化。
在步骤910,将结构粘合剂分配到致动器框架上,并且将反射镜经由反射镜的锚定部分放置在致动器框架上。
在步骤912,将该系统放置在烘箱中并进行固化。
在步骤914,在致动器框架的表面和基板上的电焊盘之间产生引线键合。
名为“Wire bonded common electrical connection in a piezoelectric micro-electro-mechanical system scanning mirror assembly”的微软专利申请最初在2023年1月提交,并在日前由美国专利商标局公布。