微软专利为AR/VR设备改进电容式传感器装置的谐振驱动电路
谐振驱动电路
(映维网Nweon 2023年08月02日)共振驱动电路可用于驱动混合现实、增强现实和虚拟现实设备中的各种电子元件。在一个例子中,电感-电容(LC)谐振驱动电路包括一个物理电感,为LC谐振驱动电路提供电感(L)。
然而,这样的物理电感器大而笨重,难以集成到这种MR/AR/VR设备中。另外,这样的物理感应器可能会对外部磁场和可渗透的材料产生反应,从而对这种MR/AR/VR设备的操作造成电磁干扰(EMI)问题。
在名为“Synthetic inductive resonant drive circuit”的专利申请中,微软就介绍了一种可在MR/AR/VR设备中采用的电容式传感器装置的谐振驱动电路。其中,所述谐振驱动电路用比物理电感器更小、更笨重的电子元件排列来合成物理电感器的电感量。
在一个例子中,这种电子元件的排列包括电阻、电容和运算放大器。这样的安排可称为无电感浮动回旋器电路。无电感浮动回旋器电路配置为反转电子元件的电流-电压特性,如电容性电路,使其表现为电感性。
无电感浮动回旋器电路取代谐振驱动电路中的物理电感,其元件的选择和配置是为了提供与物理电感相同的阻抗。无电感浮动回旋器电路不具有物理电感器的储能特性。然而,在这种情况下,缺乏这种储能特性并不重要,因为这种谐振驱动电路实际上并不使用电感器。
通过在谐振驱动电路中用无感浮动回旋器电路取代物理电感器,谐振驱动电路能够减少尺寸、重量和成本。另外,无感浮动回旋器电路不像物理电感器那样对外部磁场和可渗透材料产生反应,因此,无感浮动回旋器电路不会引起EMI问题。
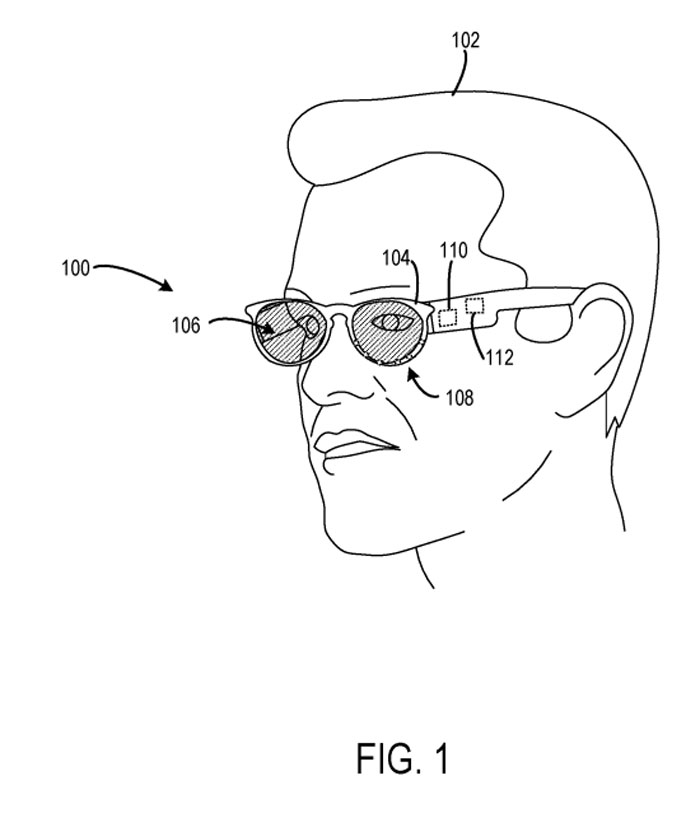
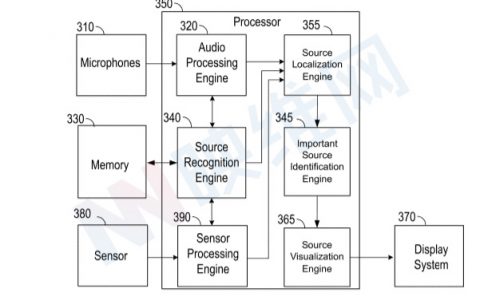
图1显示了一个由用户102佩戴的近眼显示设备100。多个感应电容器108与框架104物理耦合。在一个例子中,多个感应电容器108配置为根据用户脸部不同部分的运动来感应面部姿态。例如,这种面部手势可以包括眨眼、眨眼、微笑、皱眉和其他面部姿态。
共振驱动电路110与多个感应电容108电性连接。共振驱动电路110包括一个无电感浮动回旋器电路。所述电路配置为合成一个固定的电感,以代替物理电感。
共振驱动电路110配置为根据由无电感浮动回旋器电路合成的固定电感来测量多个感应电容器108的电容。共振驱动电路110配置为向微控制器112输出测量电容信号。测量的电容信号表示多个感应电容108中每个的测量电容。微控制器112配置为根据测量的电容信号识别用户执行的面部姿态,并根据这种识别的面部姿态控制近视眼显示设备100的操作。
在图示实施例中,谐振驱动电路110和微控制器112定位在框架104的一部分上。共振驱动电路110和微控制器112可以定位在近眼显示设备100的任何合适部分。
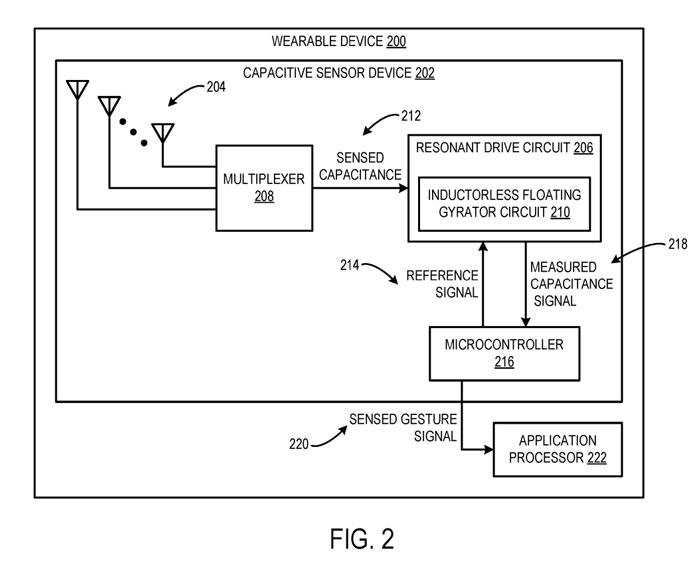
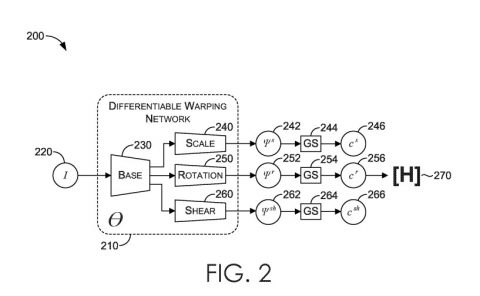
图2显示了一个包括电容式传感器设备202的可穿戴设备200。在一个例子中,可穿戴设备200代表图1中所示的近眼显示设备100。电容式传感器设备202可以配置为测量电容,以促进可穿戴设备200的任何合适的功能。电容式传感器装置202包括多个天线形式的感应电容204。多个感应电容器204中的每一个都可以通过多路复用器208选择性地电连接到谐振驱动电路206。
当感应电容器通过多路复用器208与谐振驱动电路206电连接时,谐振驱动电路206配置为接收感应电容器的感应电容212。共振驱动电路206包括一个无电感的浮动回旋器电路210,它配置为合成一个固定的电感。
这意味着浮动回旋器电路210不包括实际的物理电感器,而是通过配置其他电子元件的排列来提供用于电容感应的固定电感。
无电感浮动回旋器电路210配置为根据固定电感和感应电容器的感应电容212的变化来输出感应电容。共振驱动电路206配置为从电容式传感器设备202的微控制器216形式的信号源接收一个参考信号214。
共振驱动电路216配置为向微控制器216输出一个测量电容信号218。测得的电容信号218表示感测的电容信号212和参考信号214之间的一个或多个振幅和相位的差异。在一个实施例中,测量的电容信号218表示被感应的电容信号212和参考信号214之间的振幅和相位的差异。
另外,测量的电容信号218可以指示多个感应电容204中的每一个随时间变化的测量电容,因为每一个都选择性地电连接到谐振驱动电路206。
微控制器216配置为向应用处理器222输出感应到的手势信号220。感应手势信号220可以表示微控制器216根据多个感应电容器204的测量电容识别的一个或多个姿态。
回到图1的近眼显示设备100,一个或多个感应姿态可以包括由布置在近眼显示设备100的框架104上的多个感应电容器108感应的一个或多个面部姿态。应用处理器222可以配置为基于所感应的姿态信号220执行任何合适的操作。
在一个例子中,应用处理器222可以配置为基于传感的姿态信号来调整显示器的呈现。微控制器216的至少一些功能可以由应用处理器222执行,或者反之亦然。
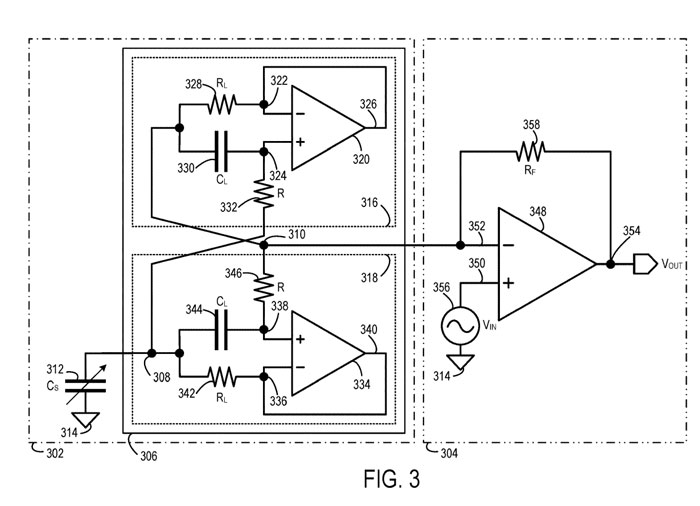
图3显示了一个用于电容式传感器设备,如图2所示的电容式传感器设备202的合成电感谐振驱动电路300的示例电路图。谐振驱动电路300包括一个谐振LC级302,与放大器级304电连接。
谐振LC级302包括一个无电感的浮动回旋器电路306。在一个例子中,无电感浮动回旋器电路306代表图2中所示的无电感浮动回旋器电路210。无电感浮动回旋器电路306包括一个输入节点308和一个输出节点310。输入节点308与一个感应电容312电性连接。
感应电容312电性连接在输入节点308和接地节点314之间。接地节点314可以设置为任何合适的参考电压。在一个例子中,接地节点的参考电压被设置为零伏。
感应电容312有一个电容(Cs),电容根据感应电容312与外来介质(例如用户面部)的电容耦合而变化。回到图2所示的例子,感应电容312可以代表多个天线中的一个,而天线通过多路复用器208选择性地与谐振驱动电路206电连接,以测量选定天线的电容。在其他例子中,感应电容312可以采取其他形式。
无电感浮动回旋器电路306配置为合成一个固定的电感,因此,谐振驱动电路300可以在没有物理电感的情况下实现。无电感浮动回旋器电路306包括两个镜像反相运算放大器子级316和318。第一子级316包括一个第一反相运算放大器320,包括一个第一反相输入端子322,一个第一非反相输入端子324,和一个第一输出端子326。
第一输出终端与第一反相输入终端322电性连接。第一RL电阻328电性地连接在无感浮动回旋器电路306的输出节点310和第一反相运算放大器320的第一反相输入终端322之间。第一RL电阻328具有一个电阻(RL)。
第一CL电容器330电性地连接在无电感浮动回旋器电路306的输出节点310和第一反相运算放大器320的第一非反相输入端子324之间。第一R电阻332电性地连接在第一反相运算放大器320的第一非反相输入端子324和无电感浮动回旋器电路306的输入节点308之间。
第二子级318包括一个第二反相运算放大器334,包括一个第二反相输入端子336,一个第二非反相输入端子338,和一个第二输出端子340。第二输出端子340与第二反相输入端子336电性连接。
第二RL电阻342电性地连接在无电感浮动回旋器电路306的输入节点308和第二反相运算放大器334的第二反相输入终端336之间。
第二CL电容器344电性地连接在无电感浮动回旋器电路306的输入节点308和第二反相运算放大器334的第二非反相输入端子338之间。第二R电阻346电性地连接在第二反相运算放大器334的第二非反相输入端338和无电感浮动回旋器电路306的输出节点310之间。
无电感浮动回旋器电路306的每个子级316和318配置为在RC微分电路配置中反转和倍增电容器CL的效果,其中电阻R上的电压通过时间表现为与电感上的电压相同。各自的反相运算放大器320、334对电压进行缓冲,并通过电阻RL将电压加回到输入端。
由此产生的效果是一个具有串联电阻RL的理想电感形式的阻抗。换句话说,无感浮动回旋器电路306的子级316和318共同具有一个阻抗,而所述阻抗等于具有与无感浮动回旋器电路306合成的固定电感相等的物理电感的阻抗。
这相当于物理感应器的阻抗。可以根据谐振驱动电路300的目标谐振频率和感应电容312的基线电容来优化无电感浮动回旋器电路306中的电阻和电容的值。
谐振LC级302有一个谐振频率,而谐振频率是基于无感浮动回旋器电路306产生的固定电感和感应电容器312的基线电容。基线电容是感应电容312没有与外来介质电容耦合或以其他方式向外来介质传递能量时的电容。
谐振LC级302配置为根据固定电感和感应电容312的电容变化,在输出节点310输出感应电容信号。谐振LC级302以这样的方式运行,不需要使用物理电感,因为无电感的浮动回旋器电路306为谐振LC级302合成固定电感。
转到图4,图表400显示了合成电感谐振驱动电路300的交流响应。图400绘制了频率与振幅的关系。相位曲线402表示合成电感谐振驱动电路300的交流响应的相位。
增益曲线404表示合成电感谐振驱动电路300的交流响应的增益。请注意,由于谐振频率处的峰值增益406,小的输入信号可以达到非常大的输出信号。因此,可以用合成电感谐振驱动电路300中的电子元件的较小电感(L)和电容(C)值来实现所需的输出信号振幅。
回到图3,放大器级304包括一个反相运算放大器348。反相运算放大器348包括一个非反相输入终端350,一个反相输入终端352,和一个输出终端354。反相输入端子352与无电感浮动回旋器电路306的输出节点310电性连接。
非反相输入终端350与一个信号源356电性连接。一个反馈电阻358电性地连接在反相输入终端352和反相运算放大器348的输出终端354之间。
在一个实施例中,运算放大器348可以有一个宽的增益带宽(GBW),以避免任何额外的群组延迟和足够的输出电流来提供驱动能力。
信号源356配置为输出一个参考信号(例如图2所示的参考信号214)。参考信号可以有一个固定的频率,等于谐振LC级302的谐振频率。信号源356电性地连接在放大器状态304的反相运算放大器348的非反相输入端子350和接地节点314之间。在图示的例子中,信号源356配置为输出一个正弦信号。在其他例子中,信号源356可以输出不同类型的参考信号。
反相运算放大器348配置为通过反相输入端子352从谐振LC级302的输出节点310接收感测电容信号。反相运算放大器348配置为通过非反相输入端子350接收来自信号源356的参考信号。
反相运算放大器348配置为向输出终端354输出测量电容信号(例如,图2中所示的测量电容信号218)。测得的电容信号表示感测的电容信号和参考信号之间的振幅和相位中的一个或多个差异。被测电容信号218表示被感应电容信号212和参考信号214之间的振幅和相位的差异。
通过在谐振驱动电路300中用无电感浮动回旋器电路306取代物理电感,相对于包括物理电感的谐振驱动电路,谐振驱动电路300的尺寸、重量和成本可以减少。在一些实施方案中,这种配置允许将谐振驱动电路作为特定应用集成电路(ASIC)来实现。
这样的ASIC芯片相对于物理电感器可以有一个较低的Z-高度约束,从而允许ASIC芯片更容易整合到移动设备的形状参数之中,例如AR/VR设备。
另外,无感浮动回旋器电路不像物理电感器那样对外部磁场和可渗透材料产生反应,因此无感浮动回旋器电路不会引起EMI问题。
相关专利:Microsoft Patent | Synthetic inductive resonant drive circuit
名为“Synthetic inductive resonant drive circuit”的微软专利申请最初在2021年12月提交,并在日前由美国专利商标局公布。